Omni-scene Perception-oriented Point Cloud Geometry Enhancement for Coordinate Quantization
{kind=link}
Abstract
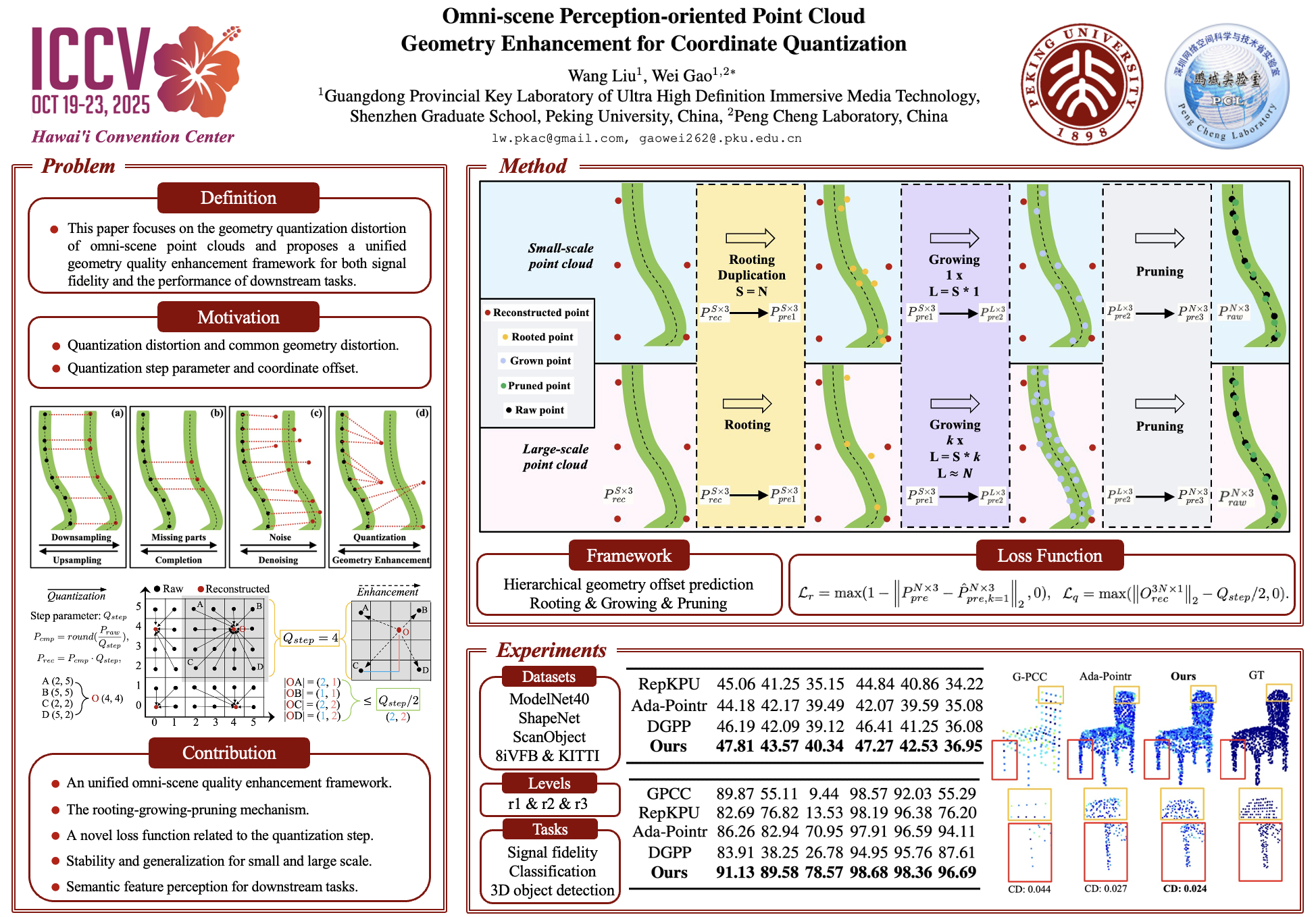
Information quantization has been widely adopted in multimedia content, such as images, videos, and point clouds. The goal of information quantization is to achieve efficient storage and transmission by reducing data precision or redundancy. However, the information distortion caused by quantization will lead to the degradation of signal fidelity and the performance of downstream tasks. This paper focuses on the geometry quantization distortion of point clouds and proposes a unified learning-based quality enhancement framework for omni-scene point clouds. Based on the characteristics of geometry quantization distortion, we analyze and find that existing upsampling methods are not competitive in dealing with point reduction and geometry displacement caused by coordinate quantization. Therefore, we design a general rooting-growing-pruning paradigm to efficiently perceive the geometry feature of quantized point clouds and improve the quality significantly. In addition, a novel loss constraint term related to the quantization step parameter is proposed to further improve quality and accelerate model convergence. To the best of our knowledge, this is the first unified quality enhancement framework for object and scene point clouds with coordinate quantization. Extensive experiments verify the superiority of the proposed method on multi-scale point clouds with different levels of quantization distortion, including object (ModelNet40, 8iVFB) and scene (S3DIS, KITTI). In particular, the enhanced point clouds improve the performance of downstream analysis tasks, including classification and 3D object detection.