Probabilistic Inertial Poser (ProbIP): Uncertainty-aware Human Motion Modeling from Sparse Inertial Sensors
{kind=link}
Abstract
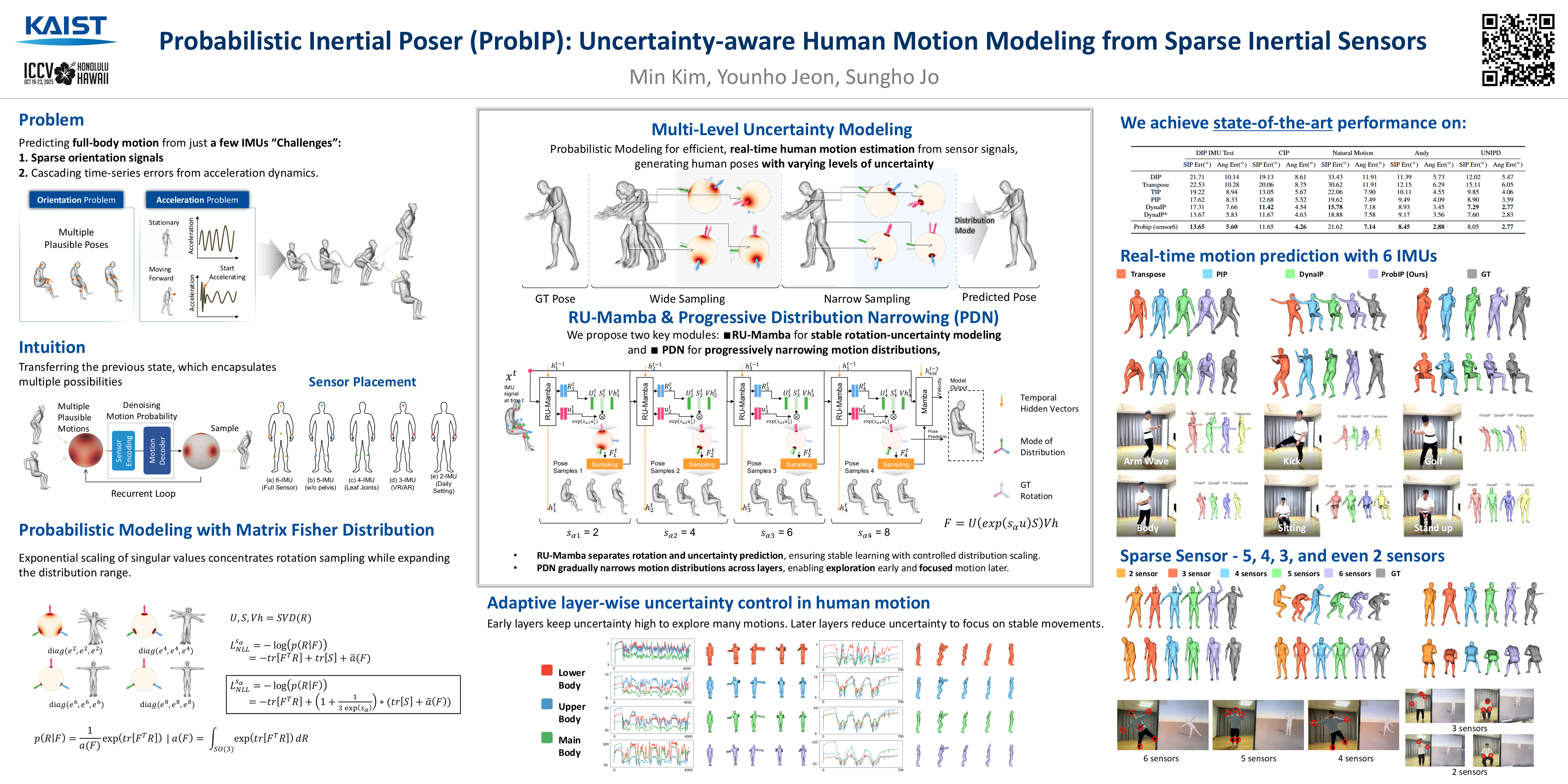
Wearable Inertial Measurement Units (IMUs) allow non-intrusive motion tracking, but limited sensor placements can introduce uncertainty in capturing detailed full-body movements. Existing methods mitigate this issue by selecting more physically plausible motion patterns but do not directly address inherent uncertainties in the data. We introduce the Probabilistic Inertial Poser (ProbIP), a novel probabilistic model that transforms sparse IMU data into human motion predictions without physical constraints. ProbIP utilizes RU-Mamba blocks to predict a matrix Fisher distribution over rotations, effectively estimating both rotation matrices and associated uncertainties. To refine motion distribution through layers, our Progressive Distribution Narrowing (PDN) technique enables stable learning across a diverse range of motions. Experimental results demonstrate that ProbIP achieves state-of-the-art performance on multiple public datasets with six IMU sensors and yields competitive outcomes even with fewer sensors. Our contributions include the development of ProbIP with RU-Mamba blocks for probabilistic motion estimation, applying PDN for uncertainty reduction, and evidence of superior results with six and reduced sensor configurations.