UPP: Unified Point-Level Prompting for Robust Point Cloud Analysis
{kind=link}
Abstract
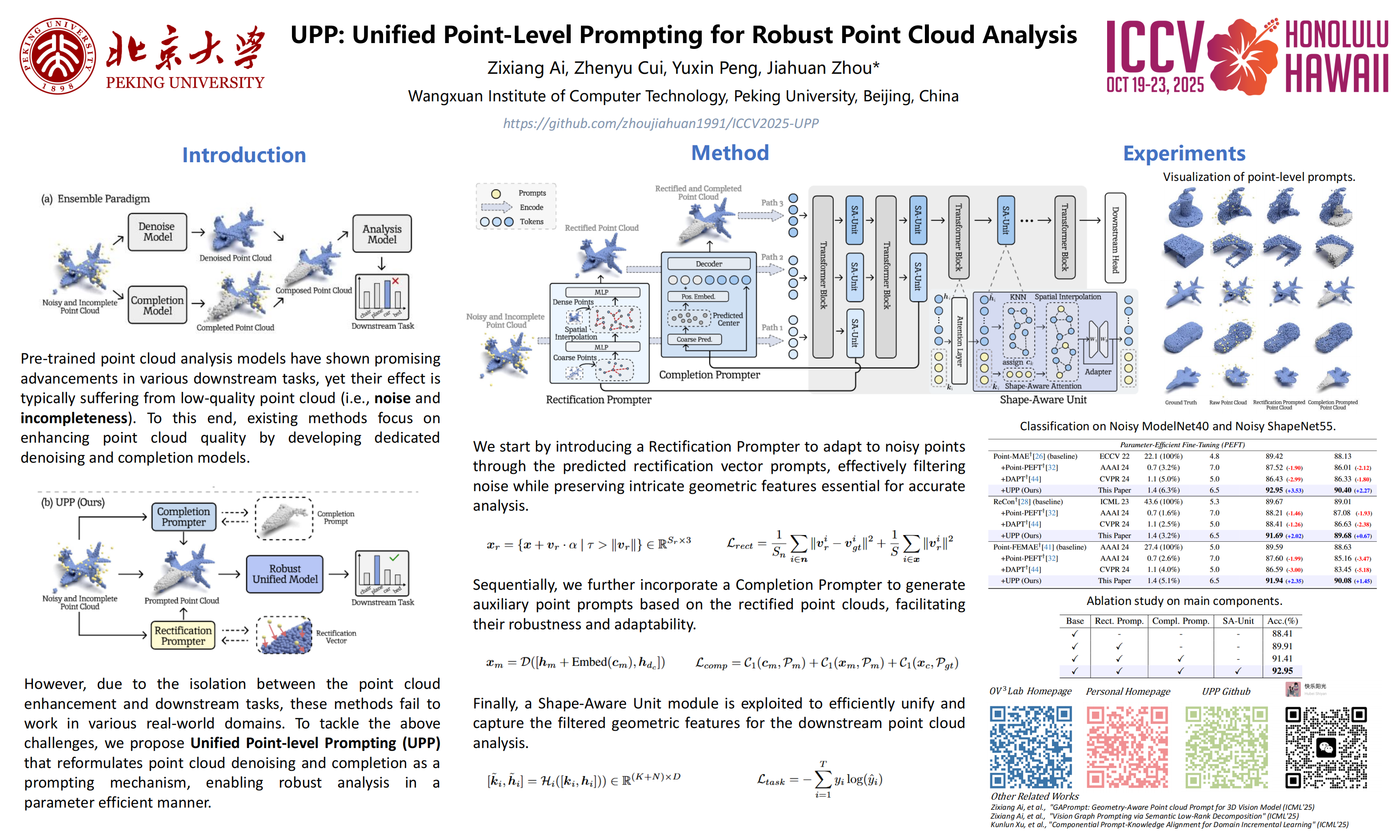
Pre-trained point cloud analysis models have shown promising advancements in various downstream tasks, yet their effectiveness is typically suffering from low-quality point cloud (i.e., noise and incompleteness), which is a common issue in real-world data due to casual object occlusions and unsatisfactory data collected by 3D sensors. To this end, existing methods focus on enhancing point cloud quality by developing dedicated denoising and completion models. However, due to the isolation between the point cloud enhancement tasks and downstream tasks, these methods fail to work in various real-world domains. In addition, the conflicting objectives between point cloud denoising and completing tasks further limit the ensemble paradigm to preserve critical geometric features in real scenarios. To tackle the above challenges, we propose a unified point-level prompting method that reformulates point cloud denoising and completion as a prompting mechanism, enabling robust analysis in a parameter-efficient manner. We start by introducing a Rectification Prompter to adapt to noisy points through the predicted rectification vector prompts, effectively filtering noise while preserving intricate geometric features essential for accurate analysis. Sequentially, we further incorporate a Completion Prompter to generate auxiliary point prompts based on the rectified point clouds, facilitating their robustness and adaptability. Finally, a Shape-Aware Unit module is exploited to efficiently unify and capture the filtered geometric features and the downstream task-aware detail information for the point cloud analysis.Extensive experiments on four datasets demonstrate the superiority and robustness of our method when handling noisy and incomplete point cloud data against existing state-of-the-art methods. Our code will be released soon.