Toward Material-Agnostic System Identification from Videos
{kind=link}
Abstract
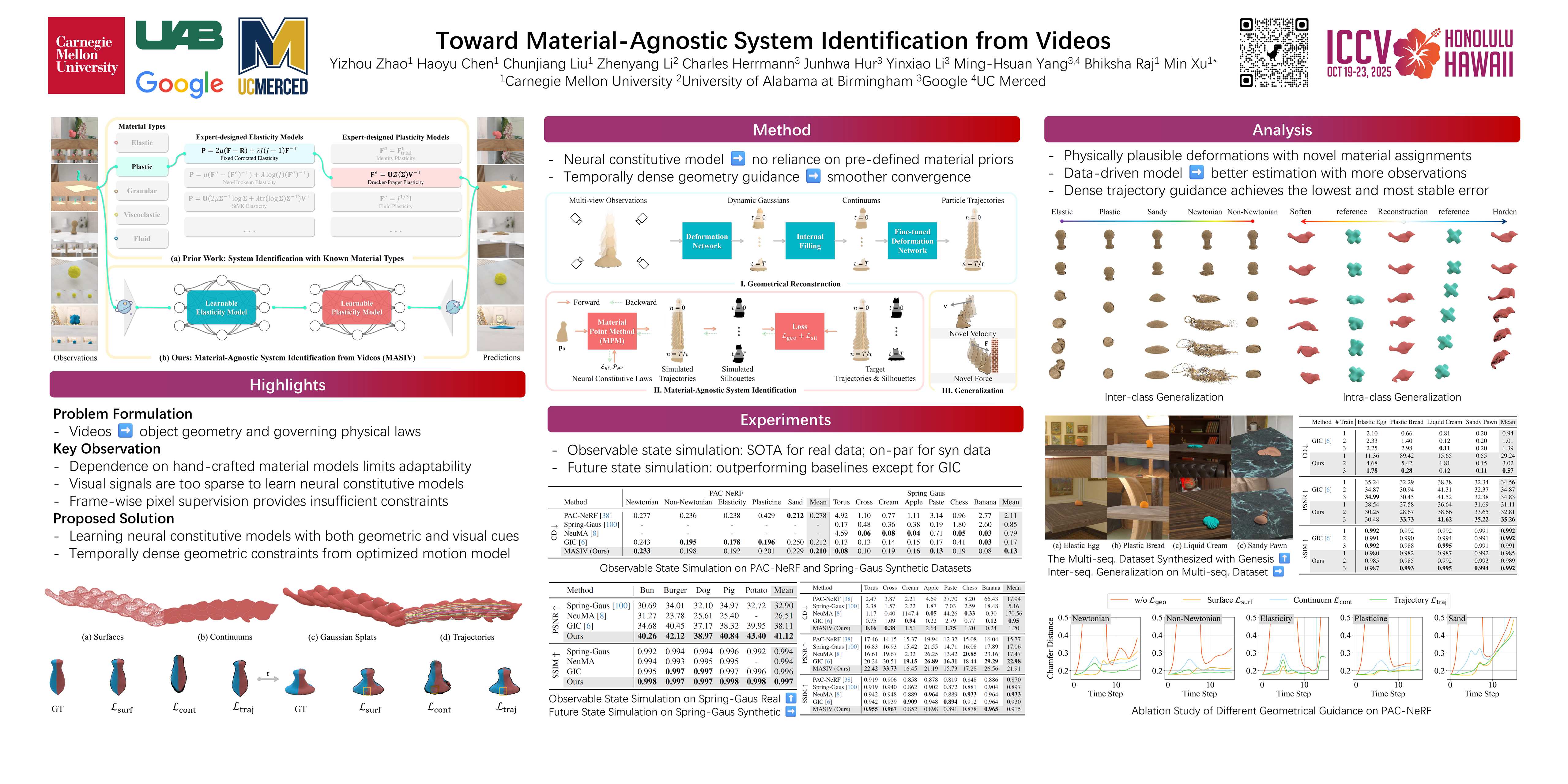
System identification from videos aims to recover object geometry and governing physical laws. Existing methods integrate differentiable rendering with simulation but rely on predefined material priors, limiting their ability to handle unknown ones. We introduce MASIV, the first vision-based framework for material-agnostic system identification. Unlike existing approaches that depend on hand-crafted constitutive laws, MASIV employs learnable neural constitutive models, inferring object dynamics without assuming a scene-specific material prior. However, the absence of full particle state information imposes unique challenges, leading to unstable optimization and physically implausible behaviors. To address this, we introduce dense geometric guidance by reconstructing continuum particle trajectories, providing temporally rich motion constraints beyond sparse visual cues. Comprehensive experiments show that MASIV achieves state-of-the-art performance in geometric accuracy, rendering quality, and generalization ability.