Tracking Tiny Drones against Clutter: Large-Scale Infrared Benchmark with Motion-Centric Adaptive Algorithm
Jiahao Zhang · Zongli Jiang · Gang Wang · Jinli Zhang · Yixin Wei · Liang Li · Yizheng Wang
{kind=link}
Abstract
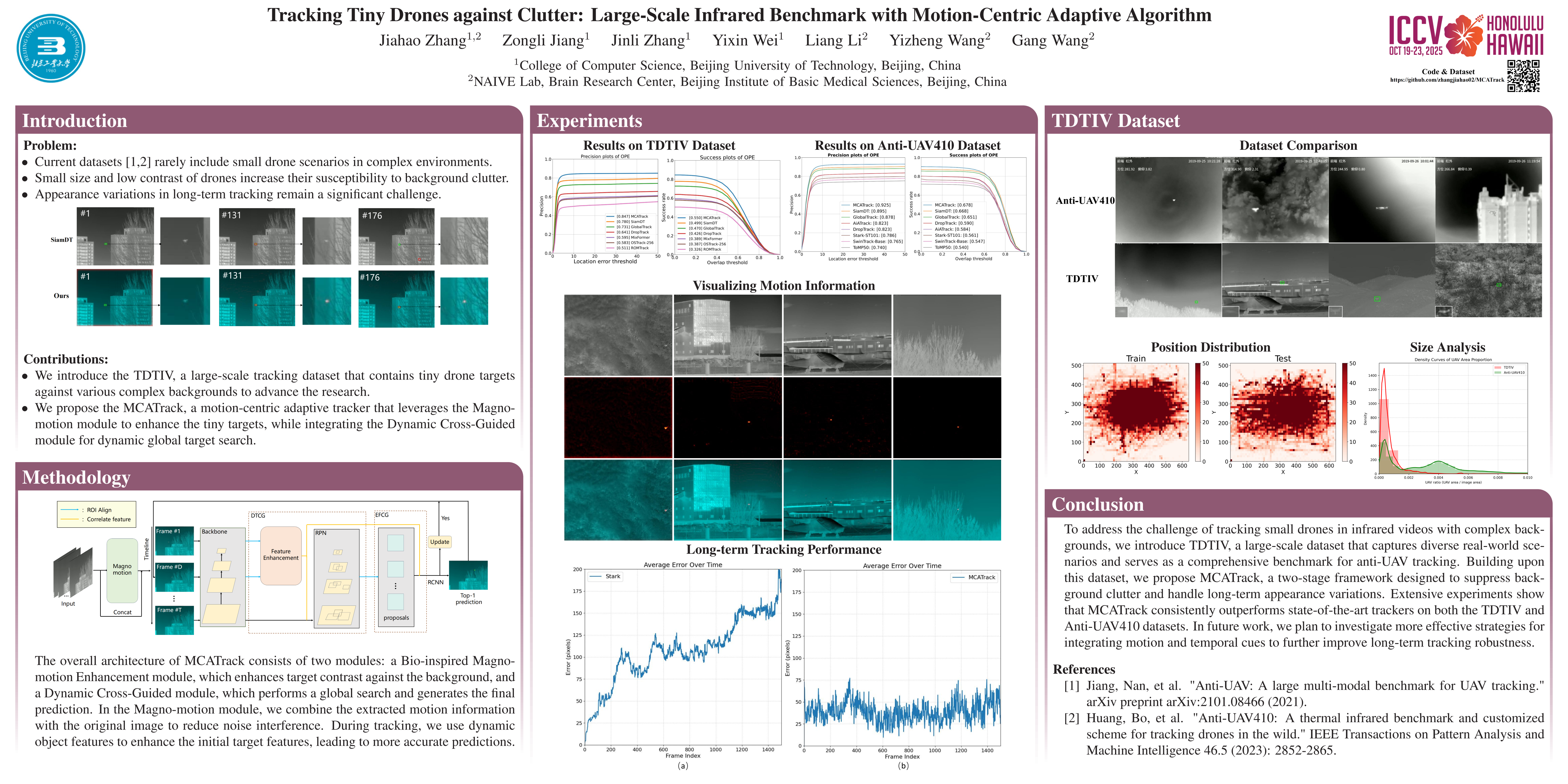
Tracking flying drones in infrared videos is a crucial yet challenging task. Existing drone trackers and datasets have limitations in dealing with and characterizing tiny targets ($\leq$20×20 pixels) against highly complex backgrounds. To tackle this issue, we have developed a large-scale benchmark for tiny drone tracking in infrared videos (TDTIV), which comprises 290k frames and 280k manually annotated bounding boxes. Unlike traditional trackers that primarily rely on appearance matching, we introduce a novel method called Motion-Centric Adaptive Tracking (MCATrack), which initially employs a magnocell-inspired motion response to enhance the local signal-to-noise ratio of tiny target regions while suppressing complex clutter. Moreover, we design a Dynamic Cross-Guided module that integrates both initial and updated target features to address pose variations in long-term tracking. This module captures the latest target information to generate highly relevant candidate regions and refines them through precise optimization to achieve more accurate tracking results.Extensive experiments performed on the TDTIV and the well-recognized Anti-UAV 410 datasets have demonstrated the superiority of MCATrack over state-of-the-art competing trackers. The codes along with the benchmark will be made publicly available.
Chat is not available.
Successful Page Load