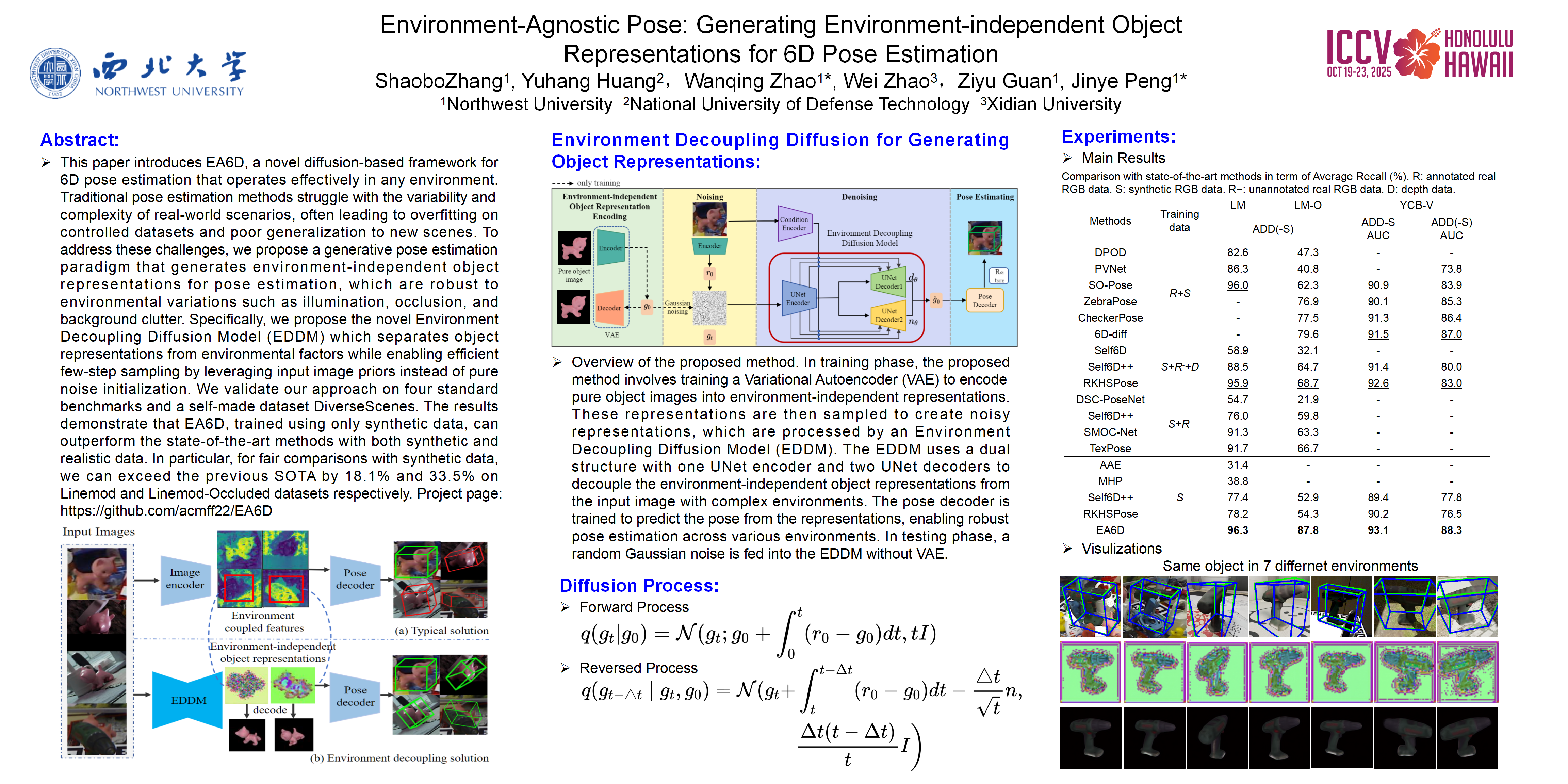
Environment-Agnostic Pose: Generating Environment-independent Object Representations for 6D Pose Estimation
Shaobo Zhang · Yuhang Huang · Wanqing Zhao · Wei Zhao · Ziyu Guan · Jinye Peng
{kind=link}
Abstract
This paper introduces EA6D, a novel diffusion-based framework for 6D pose estimation that operates effectively in any environment. Traditional pose estimation methods struggle with the variability and complexity of real-world scenarios, often leading to overfitting on controlled datasets and poor generalization to new scenes. To address these challenges, we propose a generative pose estimation paradigm that generates environment-independent object representations for pose estimation, which are robust to environmental variations such as illumination, occlusion, and background clutter. Specifically, we propose the novel Environment Decoupling Diffusion Models (EDDM) which separates object representations from environmental factors while enabling efficient few-step sampling by leveraging input image priors instead of pure noise initialization. We validate our approach on four standard benchmarks and a self-made dataset DiverseScenes. The results demonstrate that EA6D, trained using only synthetic data, can outperform the state-of-the-art methods with both synthetic and realistic data. In particular, for fair comparisons with synthetic data, we can exceed the previous SOTA by $18.1\%$ and $33.5\%$ on LINEMOD and Linemod-Occluded datasets respectively.
Chat is not available.
Successful Page Load