Semantic-guided Camera Ray Regression for Visual Localization
{kind=link}
Abstract
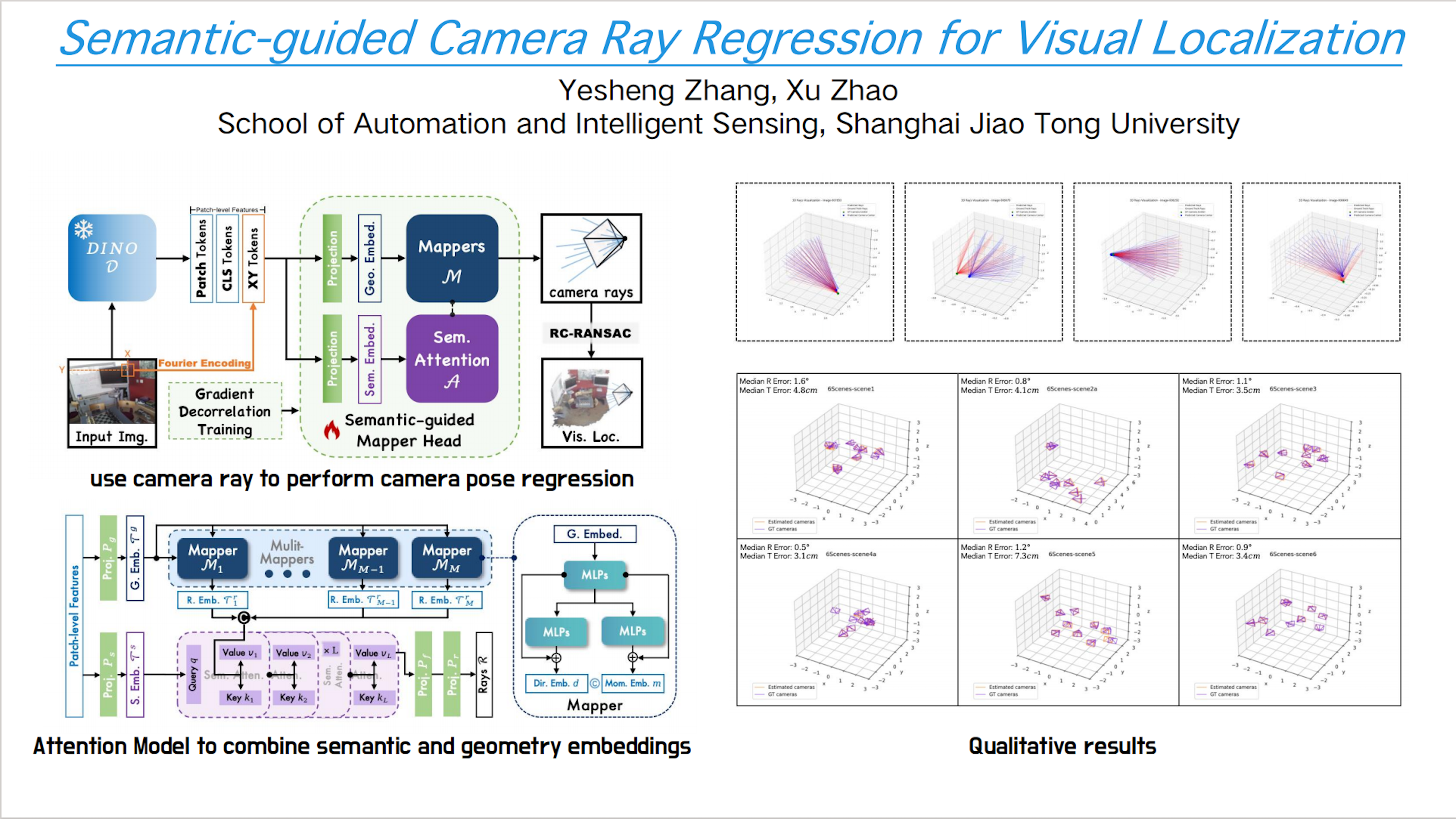
This work presents a novel framework for Visual Localization (VL), that is, regressing camera rays from query images to derive camera poses. As an overparameterized representation of the camera pose, camera rays possess superior robustness in optimization.Of particular importance, Camera Ray Regression (CRR) is privacy-preserving, rendering it a viable VL approach for real-world applications. Thus, we introduce DINO-based Multi-Mappers, coined DIMM, to achieve VL by CRR.DIMM utilizes DINO as a scene-agnostic encoder to obtain powerful features from images. To mitigate ambiguity, the features integrate both local and global perception, as well as potential geometric constraint. Then, a scene-specific mapper head regresses camera rays from these features. It incorporates a semantic attention module for soft fusion of multiple mappers, utilizing the rich semantic information in DINO features. In extensive experiments on both indoor and outdoor datasets, our methods showcase impressive performance, revealing a promising direction for advancements in VL.