C4D: 4D Made from 3D through Dual Correspondences
{kind=link}
Abstract
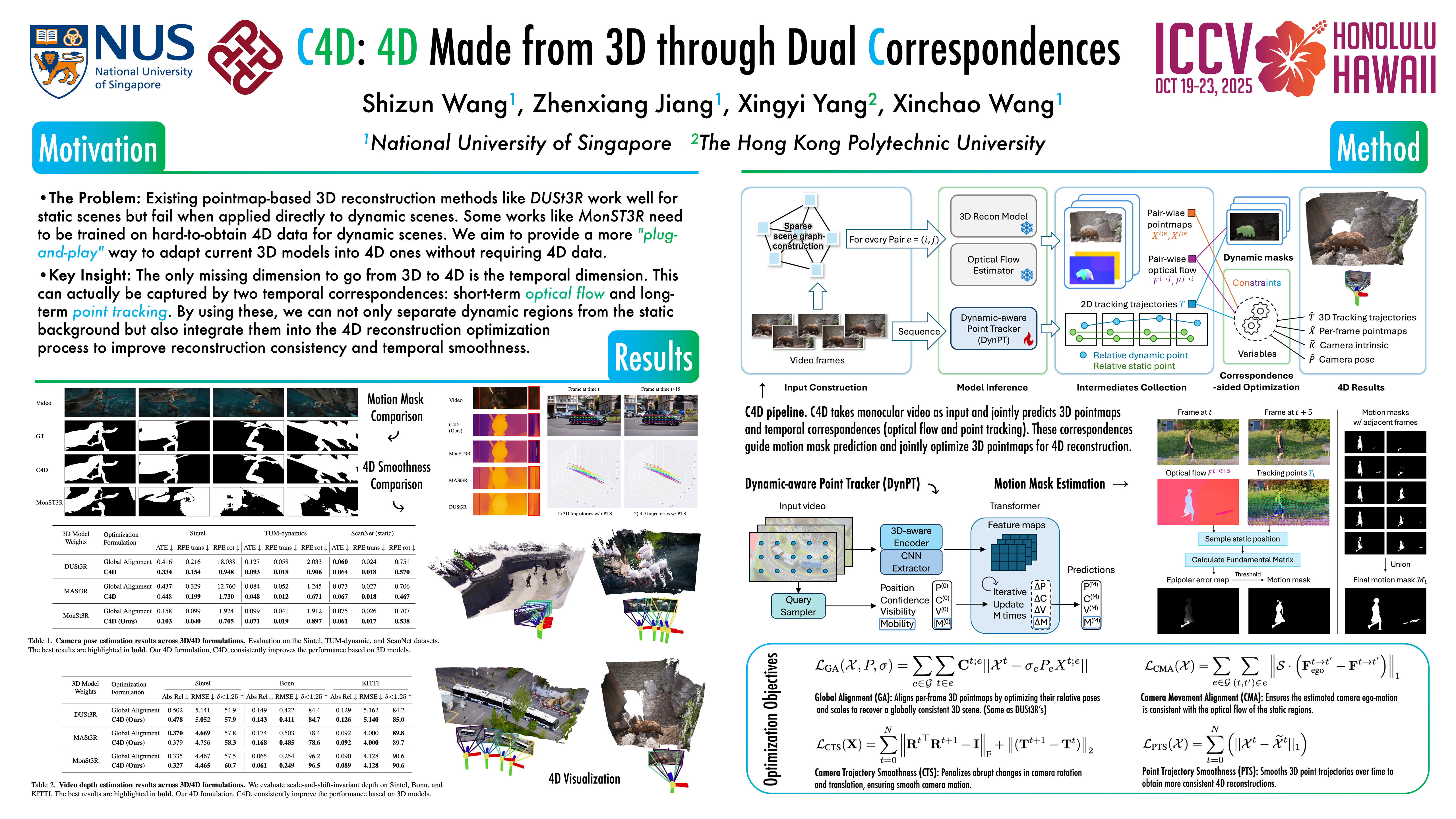
Recovering 4D from monocular video, which jointly estimates dynamic geometry and camera poses, is an inevitably challenging problem. While recent pointmap-based 3D reconstruction methods (e.g., DUSt3R) have made great progress in reconstructing static scenes, directly applying them to dynamic scenes leads to inaccurate results. This discrepancy arises because moving objects violate multi-view geometric constraints, disrupting the reconstruction.To address this, we introduce C4D, a framework that leverages temporal Correspondences to extend existing 3D reconstruction formulation to 4D. Specifically, apart from predicting pointmaps, C4D captures two types of correspondences: short-term optical flow and long-term point tracking. We train a dynamic-aware point tracker that provides additional mobility information, facilitating the estimation of motion masks to separate moving elements from the static background, thus offering more reliable guidance for dynamic scenes.Furthermore, we introduce a set of dynamic scene optimization objectives to recover per-frame 3D geometry and camera parameters. Simultaneously, the correspondences lift 2D trajectories into smooth 3D trajectories, enabling fully integrated 4D reconstruction.Experiments show that our framework achieves complete 4D recovery and demonstrates strong performance across multiple downstream tasks, including depth estimation, camera pose estimation, and point tracking.