PrimHOI: Compositional Human-Object Interaction via Reusable Primitives
{kind=link}
Abstract
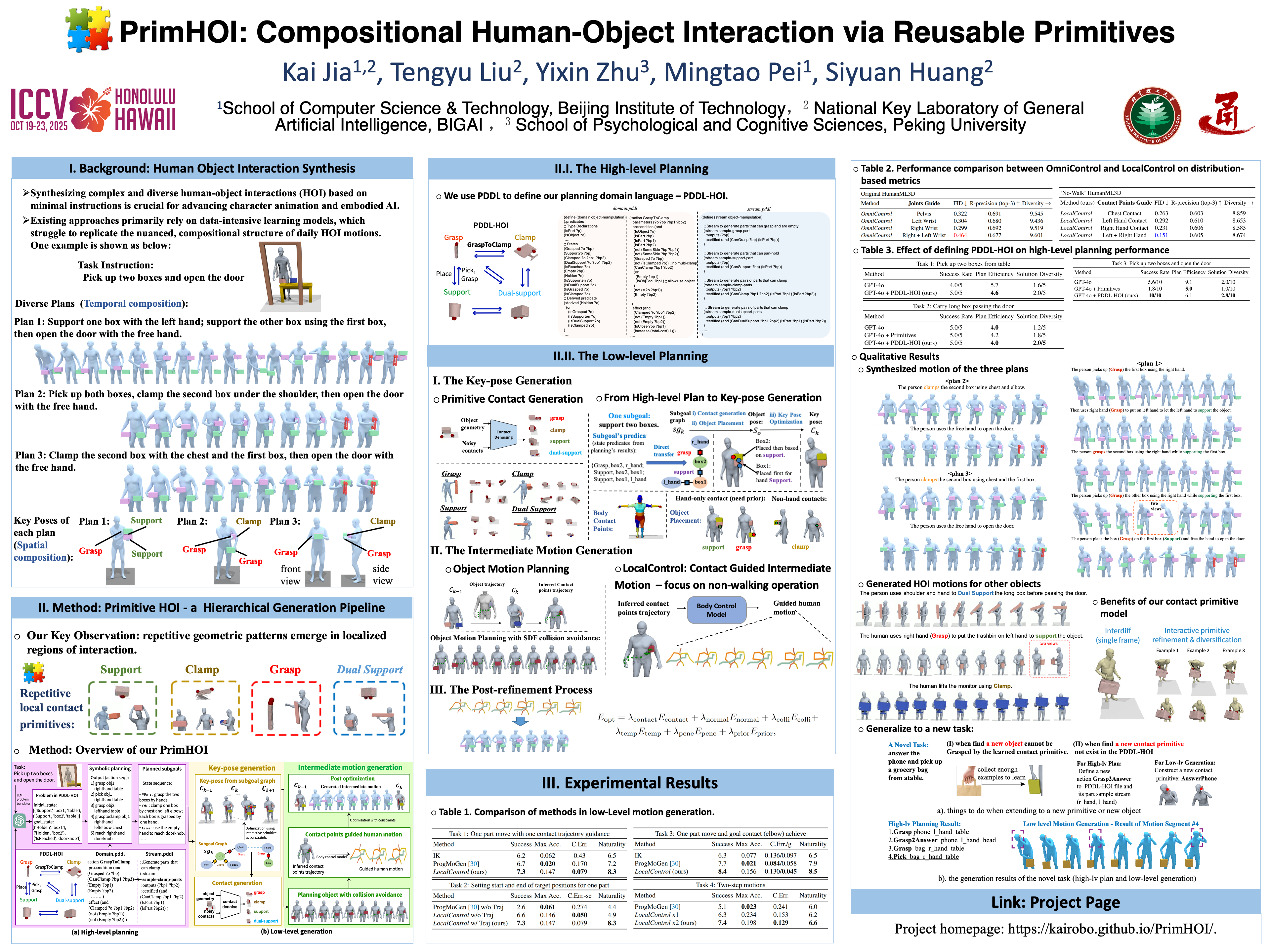
Synthesizing complex and diverse human-object interactions (HOI) based on minimal instructions is crucial for advancing character animation and embodied AI. Existing approaches primarily rely on data-intensive learning models, which struggle to replicate the nuanced, compositional structure of daily HOI motions. In this paper, we propose a novel framework that leverages a generalizable representation of HOI primitives defined by relative geometry. Our approach uses an object-centric hierarchical planning process, integrating high-level planning, key pose generation, and intermediate motion synthesis to construct realistic HOI sequences achieving novel tasks. Key poses, defined by reusable contact mode primitives, serve as flexible constraints that guide the synthesis of intricate interaction motions through a symbolic planner. Our system generates intermediate motions by first planning object trajectories with collision avoidance, followed by object-motion-guided human motion generation. To ensure coherence and realism, we apply a post-optimization process that aligns motions with planned constraints, resulting in high-quality interaction sequences. Our framework supports zero-shot transfer, enabling the synthesis of novel HOI motions without specific training examples. Experimental results demonstrate that our approach significantly enhances the adaptability, diversity, and quality of synthesized interactions, marking a meaningful step forward in flexible HOI motion generation.