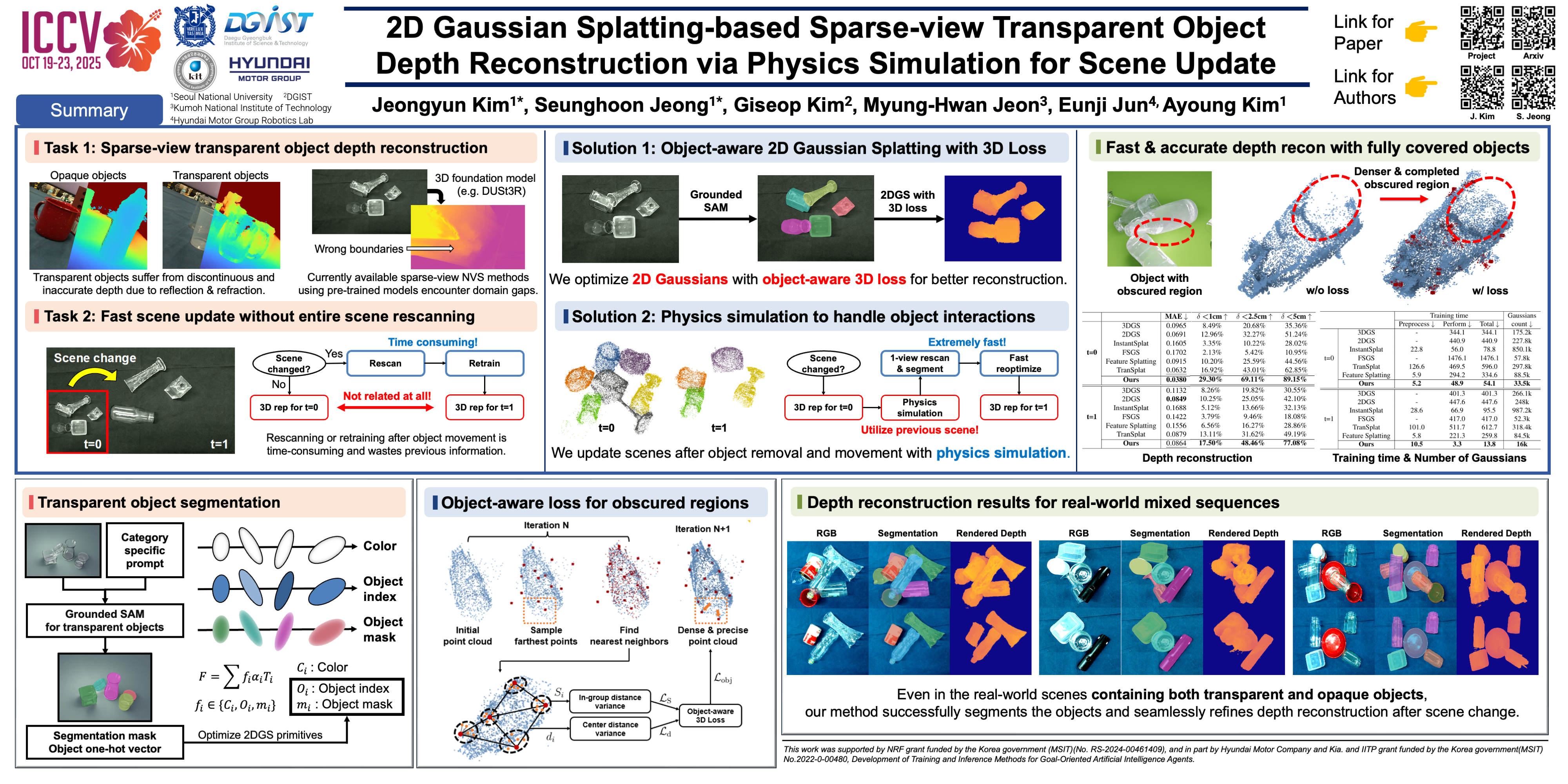
2D Gaussian Splatting-based Sparse-view Transparent Object Depth Reconstruction via Physics Simulation for Scene Update
Jeongyun Kim · Seunghoon Jeong · Giseop Kim · Myung-Hwan Jeon · Eunji Jun · Ayoung Kim
{kind=link}
Abstract
Understanding the 3D geometry of transparent objects from RGB images is challenging due to their inherent physical properties, such as reflection and refraction. To address these difficulties, especially in scenarios with sparse views and dynamic environments, we introduce a novel 2D Gaussian Splatting-based depth reconstruction method for transparent objects.Our key insight lies in separating transparent objects from the background, enabling focused optimization of Gaussians corresponding to the object. We mitigate artifacts with an object‐aware loss that places Gaussians in obscured regions, ensuring coverage of invisible surfaces while reducing overfitting. Furthermore, we incorporate a physics-based simulation that refines the reconstruction in just a few seconds, effectively handling object removal and chain‐reaction movement of remaining objects without the need for rescanning.Our model was evaluated on both synthetic and real-world sequences, and it consistently demonstrated robust improvements over existing GS-based state-of-the-art methods. In comparison with baselines, our model reduces the mean absolute error by over 45\% for the synthetic TRansPose sequences. Furthermore, despite being updated using only one image, our model reaches a $\delta < 2.5$ cm accuracy of 48.46\%, nearly double that of baselines, which uses six images.
Chat is not available.
Successful Page Load