DyGS-SLAM: Real-Time Accurate Localization and Gaussian Reconstruction for Dynamic Scenes
{kind=link}
Abstract
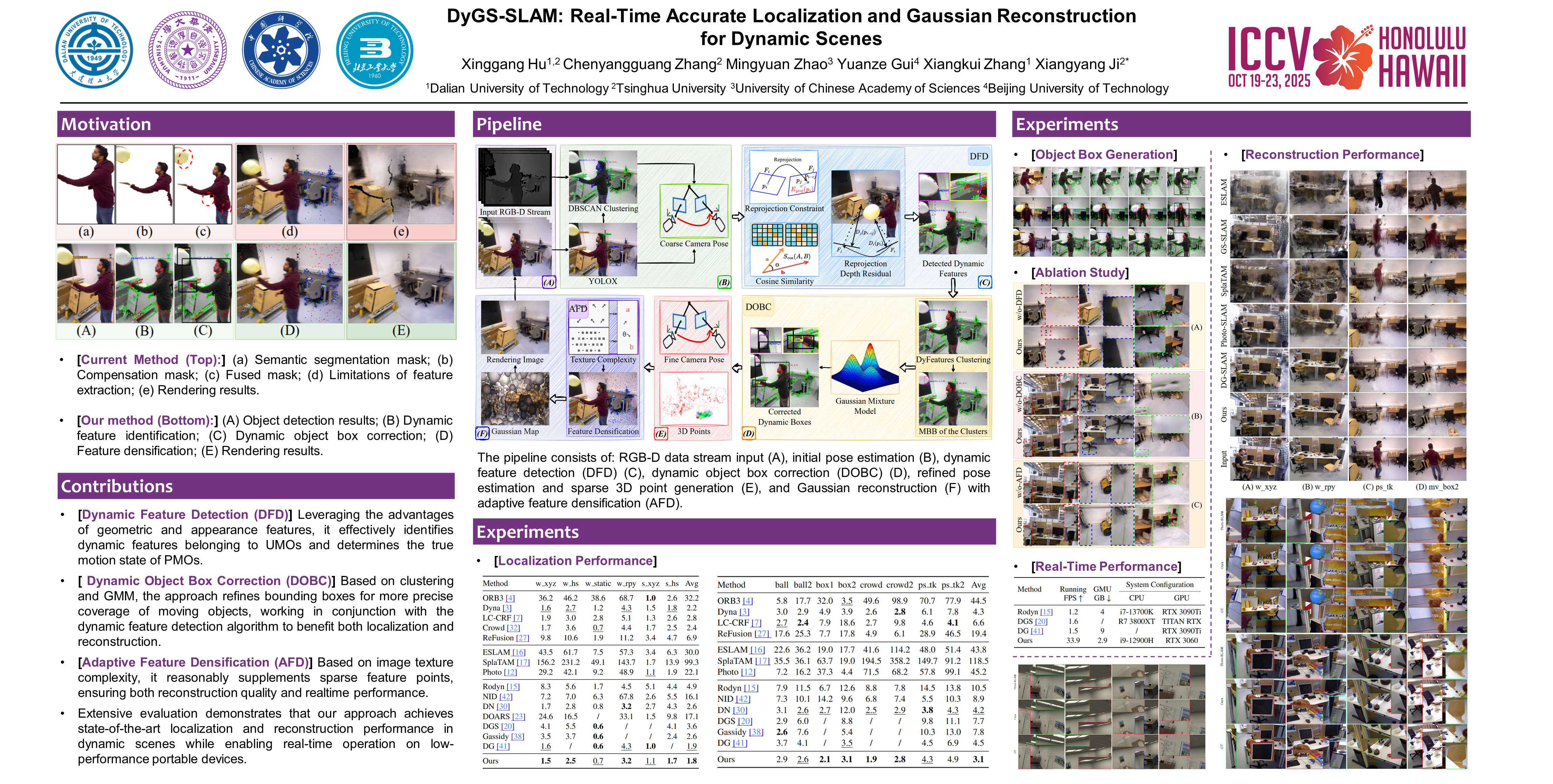
In dynamic scenes, achieving accurate camera localization and reconstructing a long-term consistent map containing only the static background are two major challenges faced by Visual Simultaneous Localization and Mapping (VSLAM). In current traditional dynamic VSLAM systems, the methods used to handle dynamic objects are primarily designed for localization; if applied to reconstruction, they are prone to introducing motion artifacts. Meanwhile, mask compensation strategies in NeRF- or 3DGS-based dynamic VSLAM systems also face challenges, such as the inability to completely eliminate dynamic object artifacts and low real-time performance. To address these issues, we leverage object detection to extract semantic information and propose a dynamic feature detection algorithm based on both geometry and appearance. This algorithm accurately identifies known and unknown moving objects and determines their actual motion states. To mitigate the issue of insufficient detection box coverage, we design a dynamic object box correction algorithm based on clustering and Gaussian mixture models to comprehensively identify moving object regions. Furthermore, to overcome the limitations of sparse features in texture-scarce environments, we introduce a feature densification strategy based on image texture complexity, enhancing reconstruction quality while maintaining real-time performance. Extensive experimental evaluations demonstrate that our system achieves state-of-the-art localization and reconstruction performance in dynamic scenes and can run in real time on resource-constrained devices.