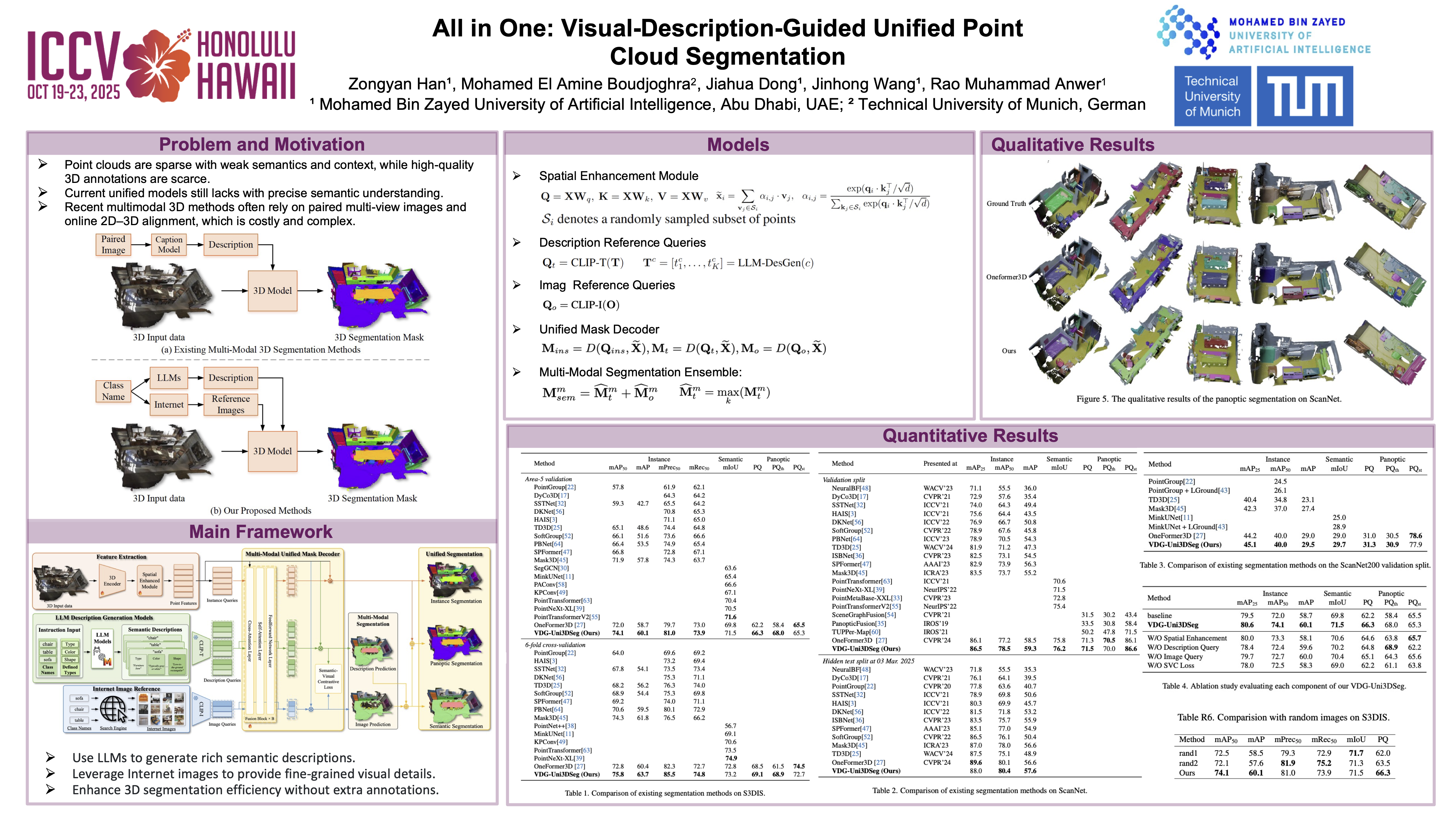
All in One: Visual-Description-Guided Unified Point Cloud Segmentation
{kind=link}
Abstract
Unified segmentation of 3D point clouds is crucial for scene understanding, but is hindered by its sparse structure, limited annotations, and the challenge of distinguishing fine-grained object classes in complex environments. Existing methods often struggle to capture rich semantic and contextual information due to limited supervision and a lack of diverse multimodal cues, leading to suboptimal differentiation of classes and instances.To address these challenges, we propose VDG-Uni3DSeg, a novel framework that integrates pre-trained vision-language models (e.g., CLIP) and large language models (LLMs) to enhance 3D segmentation. By leveraging LLM-generated textual descriptions and reference images from the internet, our method incorporates rich multimodal cues, facilitating fine-grained class and instance separation.We further design a Semantic-Visual Contrastive Loss to align point features with multimodal queries and a Spatial Enhanced Module to model scene-wide relationships efficiently. Operating within a closed-set paradigm that utilizes multimodal knowledge generated offline, VDG-Uni3DSeg achieves state-of-the-art results in semantic, instance and panoptic segmentation, offering a scalable and practical solution for 3D understanding.We will release our code and models.