OD-RASE: Ontology-Driven Risk Assessment and Safety Enhancement for Autonomous Driving
{kind=link}
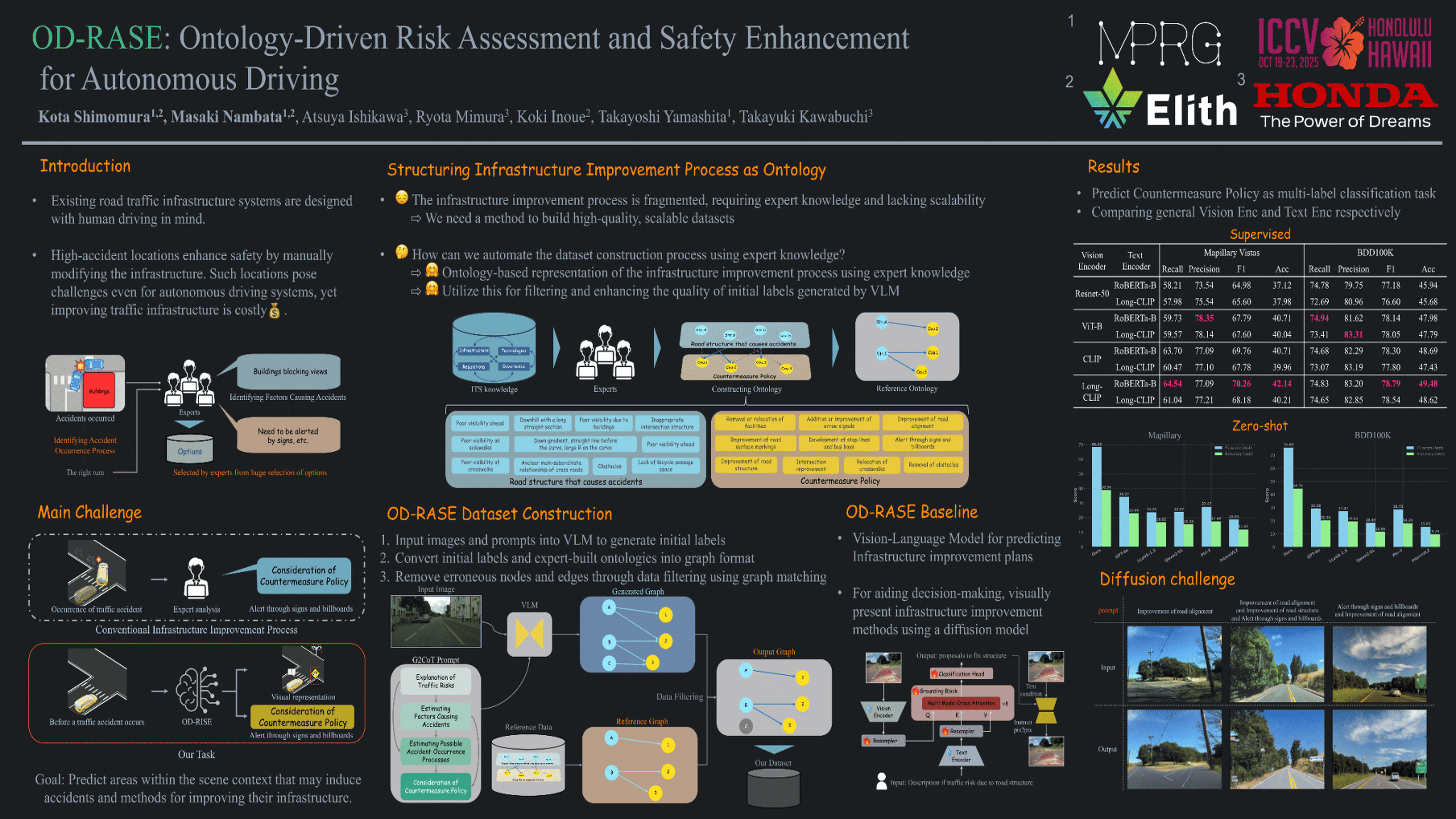
Abstract
Although autonomous driving systems demonstrate high perception performance, they still face limitations when handling rare situations or complex road structures. Since existing road infrastructures are designed for human drivers, safety improvements are typically introduced only after accidents occur. This reactive approach poses a significant challenge for autonomous systems, which require proactive risk mitigation. To address this issue, we propose OD-RASE, a framework for enhancing the safety of autonomous driving systems by detecting road structures that cause traffic accidents and connecting these findings to infrastructure development. First, we formalize an ontology based on specialized domain knowledge of road traffic systems. In parallel, we generate infrastructure improvement proposals using a large-scale visual language model (LVLM) and use ontology-driven data filtering to enhance their reliability. This process automatically annotates improvement proposals on pre-accident road images, leading to the construction of a new dataset. Furthermore, we introduce the Baseline approach (OD-RASE model), which leverages LVLM and a diffusion model to produce both infrastructure improvement proposals and generated images of the improved road environment. Our experiments demonstrate that ontology-driven data filtering enables highly accurate prediction of accident-causing road structures and the corresponding improvement plans. We believe that this work contributes to the overall safety of traffic environments and marks an important step toward the broader adoption of autonomous driving systems.