Uncertainty-Aware Gradient Stabilization for Small Object Detection
{kind=link}
Abstract
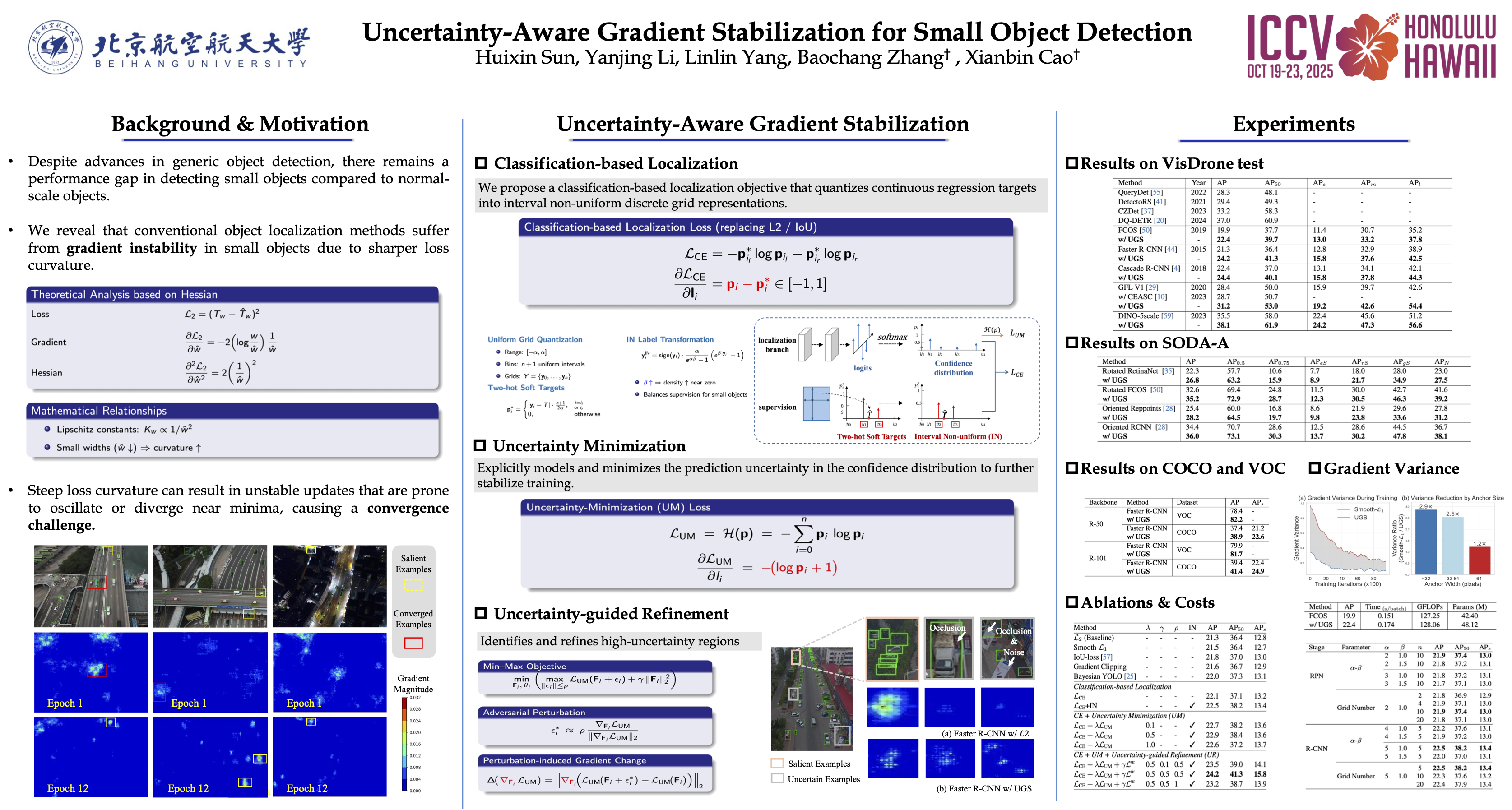
Despite advances in generic object detection, there remains a performance gap in detecting small objects compared to normal-scale objects. We reveal that conventional object localization methods suffer from gradient instability in small objects due to sharper loss curvature, leading to a convergence challenge. To address the issue, we propose Uncertainty-Aware Gradient Stabilization (UGS), a framework that reformulates object localization as a classification task to stabilize gradients. UGS quantizes continuous labels into interval non-uniform discrete representations. Under a classification-based objective, the localization branch generates bounded and confidence-driven gradients, mitigating instability. Furthermore, UGS integrates an uncertainty minimization (UM) loss that reduces prediction variance and an uncertainty-guided refinement (UR) module that identifies and refines high-uncertainty regions via perturbations. Evaluated on four benchmarks, UGS consistently improves anchor-based, anchor-free, and state-of-the-art small object detectors. Especially, UGS boosts the prior art DNTR by 3.2\% AP on the VisDrone dataset. The code will be released upon acceptance.