LeGrad: An Explainability Method for Vision Transformers via Feature Formation Sensitivity
{kind=link}
Abstract
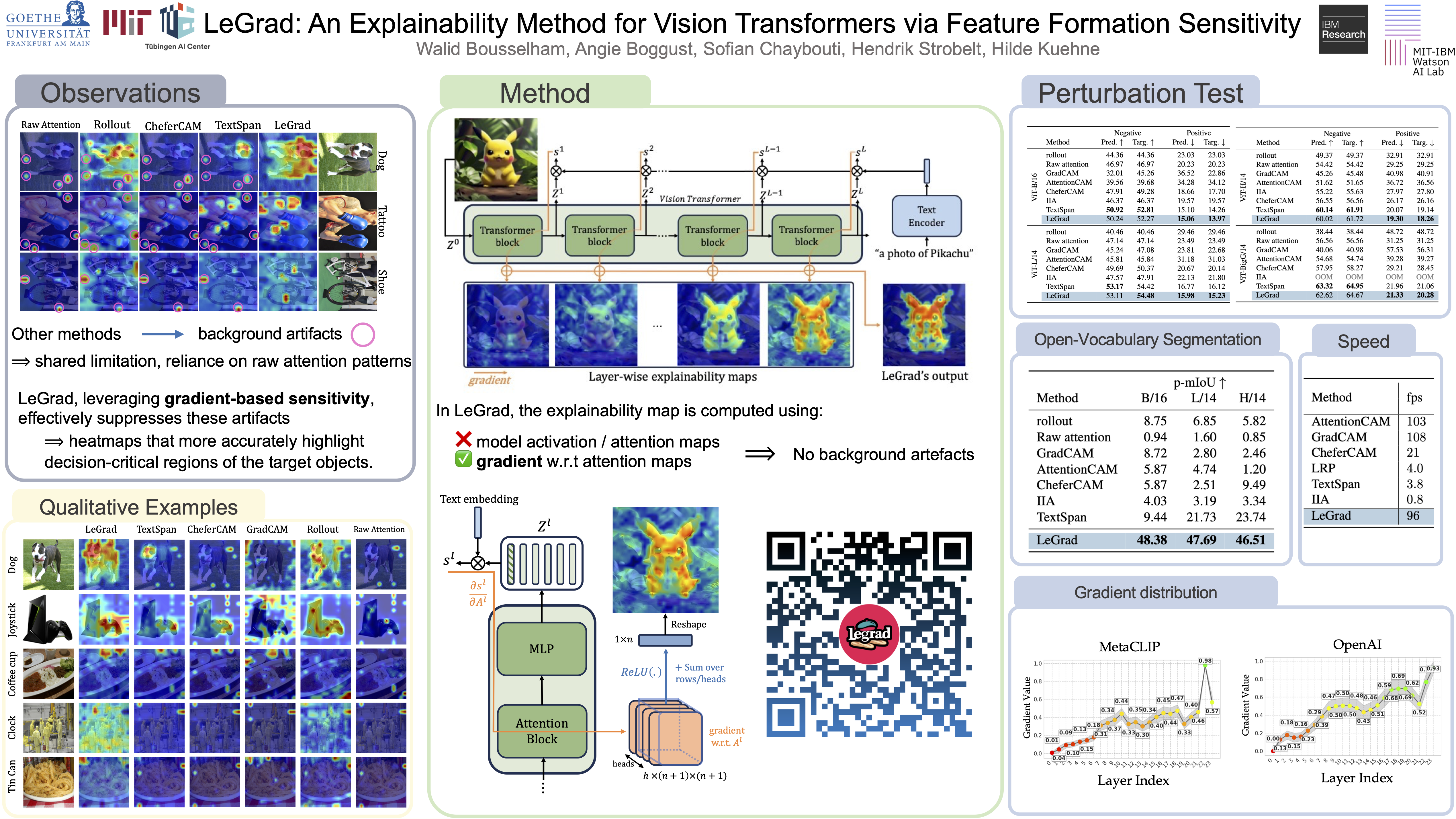
Vision Transformers (ViTs) have become a standard architecture in computer vision. However, because of their modeling of long-range dependencies through self-attention mechanisms, the explainability of these models remains a challenge. To address this, we propose LeGrad, an explainability method specifically designed for ViTs. LeGrad computes the gradient with respect to the attention maps of single ViT layers, considering the gradient itself as the explainability signal. We aggregate the signal over all layers, combining the activations of the last as well as intermediate tokens to produce the merged explainability map. This makes LeGrad a conceptually simple and an easy-to-implement method to enhance the transparency of ViTs. We evaluate LeGrad in various setups, including segmentation, perturbation, and open-vocabulary settings, showcasing its improved spatial fidelity and its versatility compared to other SotA explainability methods. Code will be released.