Contact-Aware Amodal Completion for Human-Object Interaction via Multi-Regional Inpainting
 Highlight
Highlight
{kind=link}
Abstract
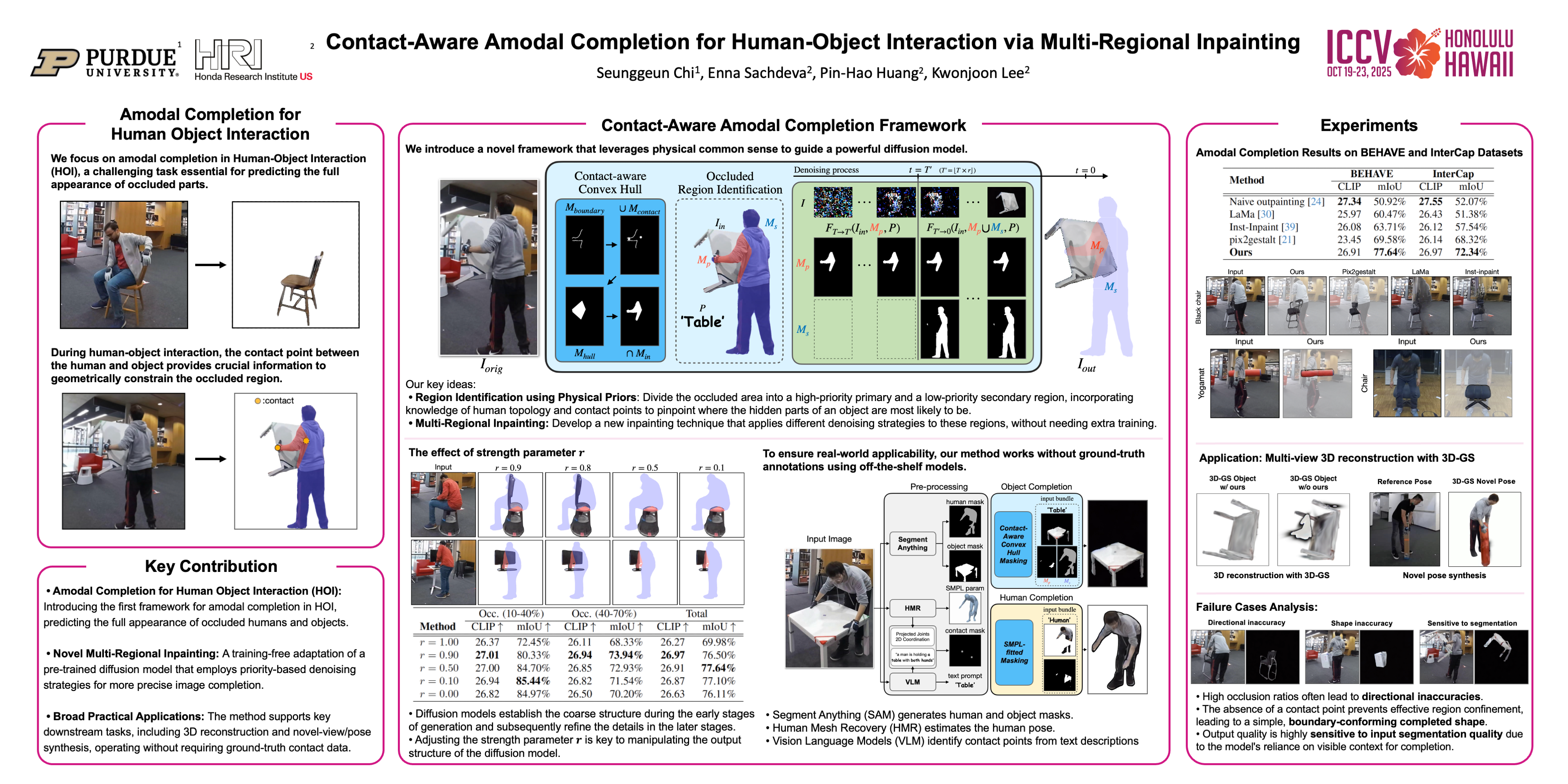
Amodal completion, the task of inferring the complete appearance of objects despite partial occlusions, is crucial for understanding complex human–object interactions (HOI) in computer vision and robotics. Existing methods, including pre-trained diffusion models, often struggle to generate plausible completions in dynamic scenarios due to their limited understanding of HOI. To address this challenge, we propose a novel approach that leverages physical prior knowledge alongside a specialized multi-regional inpainting technique tailored for HOI. By incorporating physical constraints derived from human topology and contact information, we define two distinct regions: the primary region, where occluded object parts are most likely to reside, and the secondary region, where occlusions are less probable. Our multi-regional inpainting method employs customized denoising strategies across these regions within a diffusion model, thereby enhancing the accuracy and realism of generated completions in both shape and visual detail. Experimental results demonstrate that our approach substantially outperforms existing methods in HOI scenarios, advancing machine perception toward a more human-like understanding of dynamic environments. Furthermore, we show that our pipeline remains robust even without ground-truth contact annotations, broadening its applicability to tasks such as 3D reconstruction and novel view/pose synthesis. Code will be made publicly available upon acceptance.