Forecasting Continuous Non-Conservative Dynamical Systems in SO(3)
Lennart Bastian ⋅ Mohammad Rashed ⋅ Nassir Navab ⋅ Tolga Birdal
2025 Poster
{kind=link}
Abstract
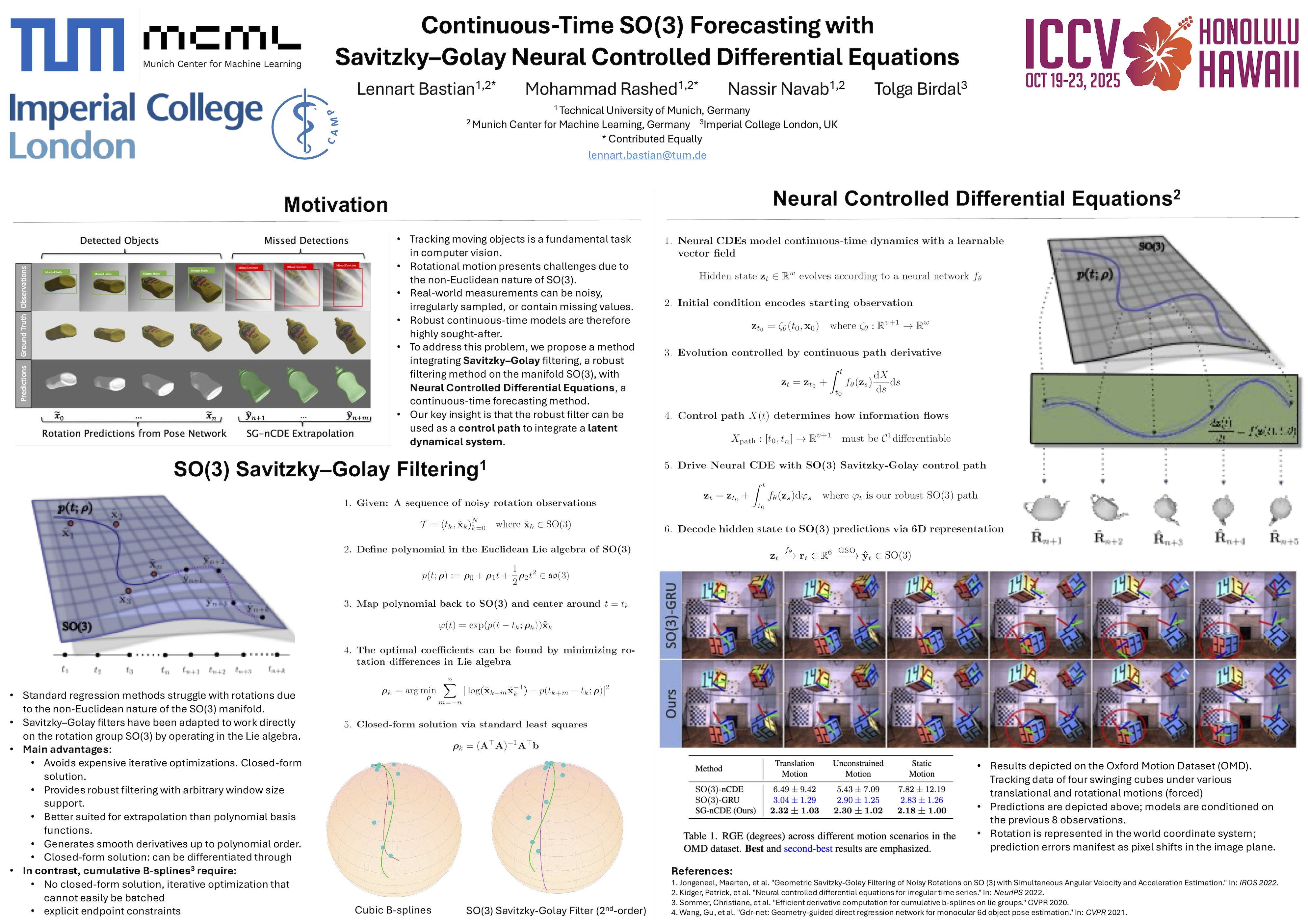
Modeling the rotation of moving objects is a fundamental task in computer vision, yet $SO(3)$ extrapolation still presents numerous challenges: (1) unknown quantities such as the moment of inertia complicate dynamics, (2) the presence of external forces and torques can lead to non-conservative kinematics, and (3) estimating evolving state trajectories under sparse, noisy observations requires robustness.We propose modeling trajectories of noisy pose estimates on the manifold of 3D rotations in a physically and geometrically meaningful way by leveraging Neural Controlled Differential Equations guided with $SO(3)$ Savitzky-Golay paths.Existing extrapolation methods often rely on energy conservation or constant velocity assumptions, limiting their applicability in real-world scenarios involving non-conservative forces. In contrast, our approach is agnostic to energy and momentum conservation while being robust to input noise, making it applicable to complex, non-inertial systems. Our approach is easily integrated as a module in existing pipelines and generalizes well to trajectories with unknown physical parameters.By learning to approximate object dynamics from noisy states during training, our model attains robust extrapolation capabilities in simulation and various real-world settings.
Chat is not available.
Successful Page Load