Communication-Efficient Multi-Vehicle Collaborative Semantic Segmentation via Sparse 3D Gaussian Sharing
Tianyu Hong ⋅ Xiaobo Zhou ⋅ Wenkai Hu ⋅ Qi Xie ⋅ Zhihui Ke ⋅ Tie Qiu
2025 Poster
{kind=link}
Abstract
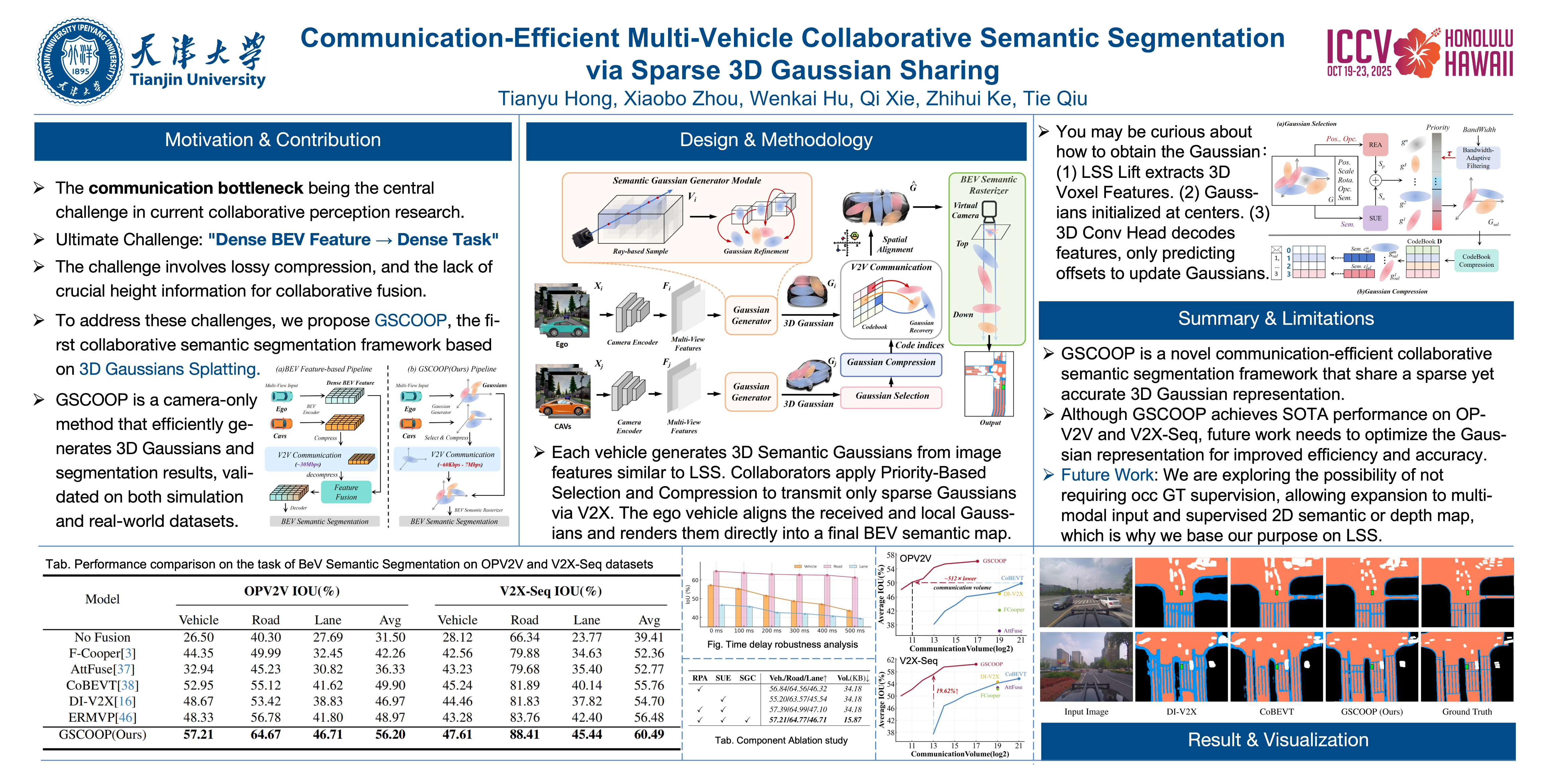
Collaborative perception is considered a promising approach to address the inherent limitations of single-vehicle systems by sharing data among vehicles, thereby enhancing performance in perception tasks such as bird’s‐eye view (BEV) semantic segmentation. However, existing methods share the entire dense, scene-level BEV feature, which contains significant redundancy and lacks height information, ultimately leading to unavoidable bandwidth waste and performance degradation. To address these challenges, we present $\textit{GSCOOP}$, the first collaborative semantic segmentation framework that leverages sparse, object-centric 3D Gaussians to fundamentally overcome communication bottlenecks. By representing scenes with compact Gaussians that preserve complete spatial information, $\textit{GSCOOP}$ achieves both high perception accuracy and communication efficiency. To further optimize transmission, we introduce the Priority-Based Gaussian Selection (PGS) module to adaptively select critical Gaussians and a Semantic Gaussian Compression (SGC) module to compress Gaussian attributes with minimal overhead. Extensive experiments on OPV2V and V2X-Seq demonstrate that GSCOOP achieves state-of-the-art performance, even with more than $500\times$ lower communication volume.
Chat is not available.
Successful Page Load