Completing 3D Partial Assemblies with View-Consistent 2D-3D Correspondence
{kind=link}
Abstract
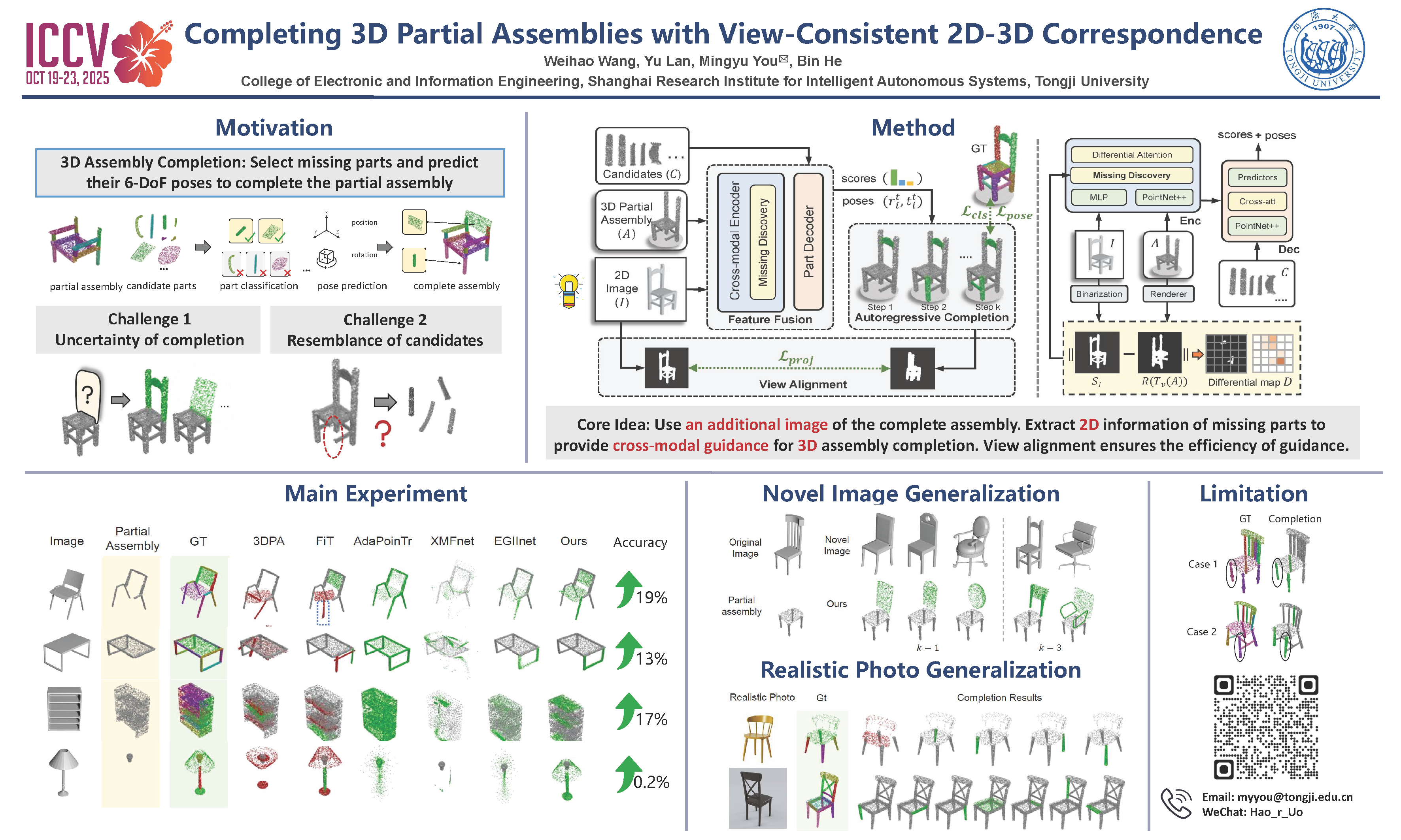
3D assembly completion represents a fundamental task in 3D computer vision and robotics. This task aims to retrieve the missing parts from a set of candidates and predict their 6-DoF poses to make the partial assembly complete. However, due to the inherent uncertainty in completion and the similarity among candidates, even humans struggle to achieve precise completion without external guidance. To address this challenge, we introduce an auxiliary image depicting the complete assembly from a specific view. The primary challenge lies in the lack of correspondence or grounding between the partial assembly and the image, leading to ambiguities in identifying missing parts and ineffective guidance for completion. Moreover, this correspondence heavily depends on the view of image, which, unfortunately, is often unknown in real-world scenarios. To this end, we propose a novel cross-modal 3D assembly completion framework. At its core is missing-oriented feature fusion augmented by self-supervised view alignment to establish view-consistent 2D-3D correspondence between the image and the partial assembly, which effectively captures clues of missing parts from the image and provides targeted guidance for completion. Extensive experiments demonstrate our state-of-the-art performance on the PartNet dataset and show its generalization capabilities in two downstream applications: component suggestion and furniture restoration.