Adaptive Articulated Object Manipulation On The Fly with Foundation Model Reasoning and Part Grounding
{kind=link}
Abstract
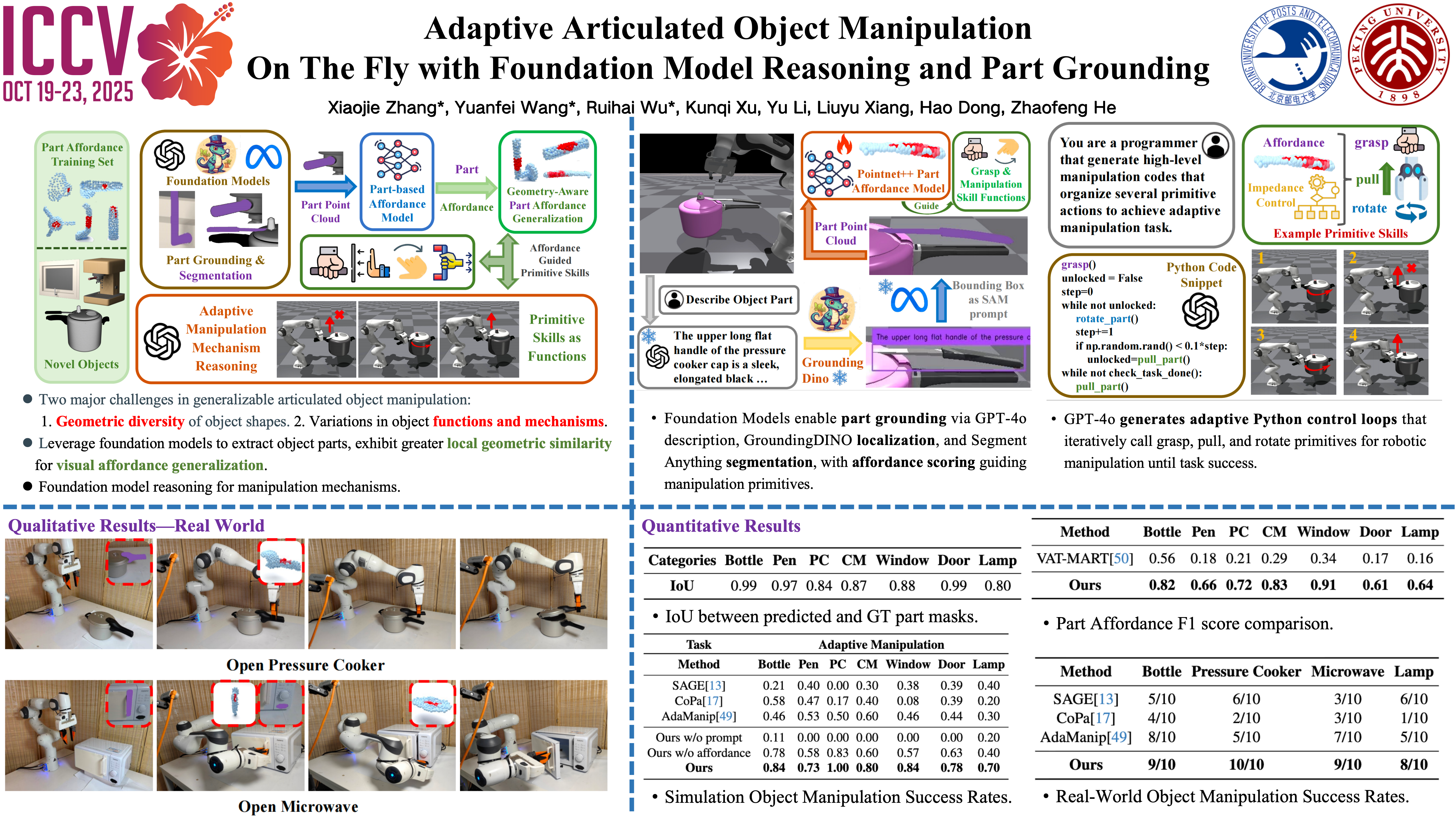
Articulated objects pose diverse manipulation challenges for robots. Since their internal structures are not directly observable, robots must adaptively explore and refine actions to generate successful manipulation trajectories. While existing works have attempted cross-category generalization in adaptive articulated object manipulation, two major challenges persist: (1) the geometric diversity of real-world articulated objects complicates visual perception and understanding, and (2) variations in object functions and mechanisms hinder the development of a unified adaptive manipulation strategy.To address these challenges, we propose \textbf{AdaRPG}, a novel framework that leverages foundation models to extract object parts, which exhibit greater local geometric similarity than entire objects, thereby enhancing visual affordance generalization for functional primitive skills. To support this, we construct a part-level affordance annotation dataset to train the affordance model. Additionally, AdaRPG utilizes the common knowledge embedded in foundation models to reason about complex mechanisms and generate high-level control codes that invoke primitive skill functions based on part affordance inference.Simulation and real-world experiments demonstrate AdaRPG’s strong generalization ability across novel articulated object categories.