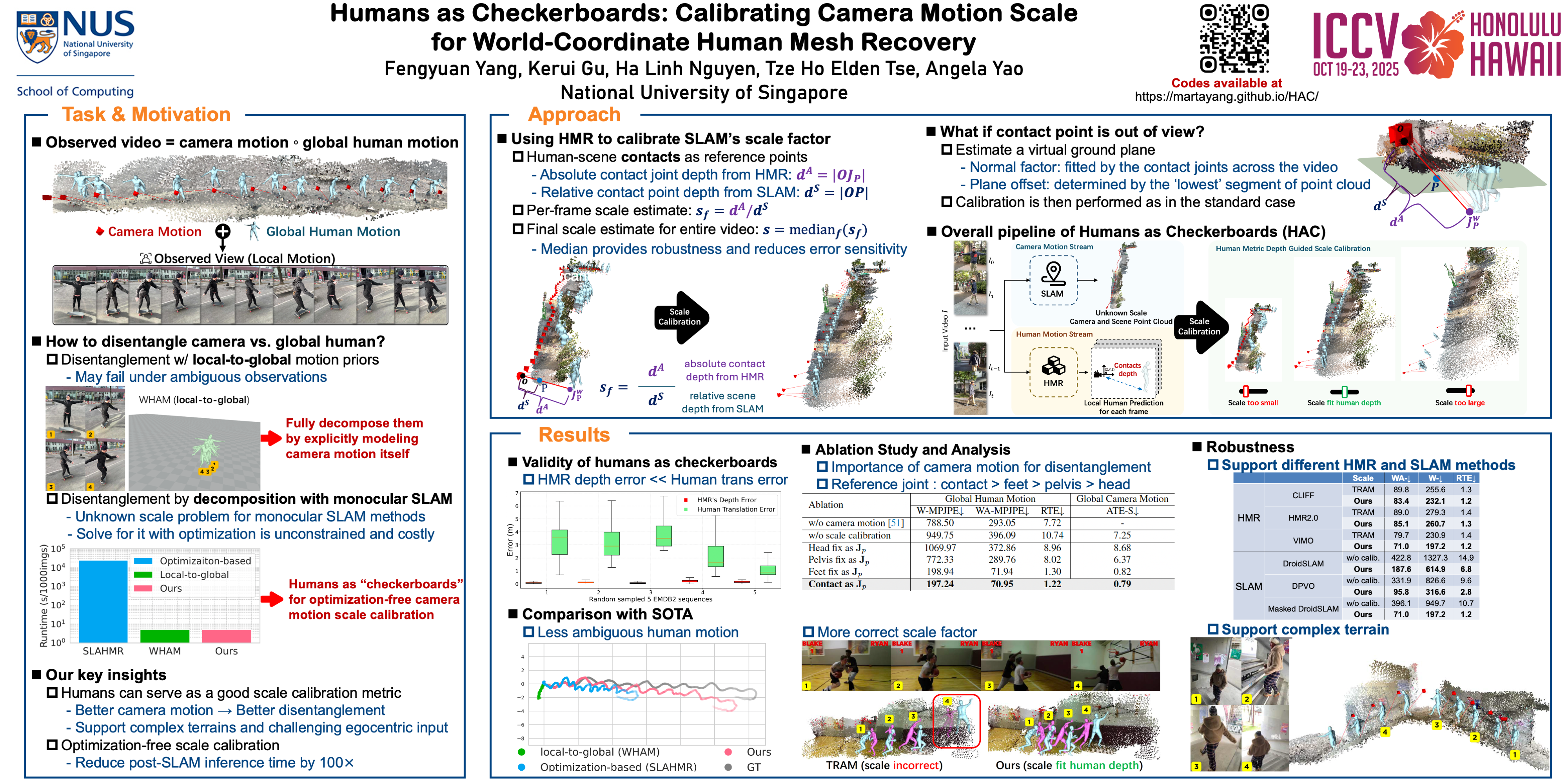
Humans as Checkerboards: Calibrating Camera Motion Scale for World-Coordinate Human Mesh Recovery
Fengyuan Yang ⋅ Kerui Gu ⋅ Ha Linh Nguyen ⋅ Tze Ho Elden Tse ⋅ Angela Yao
2025 Poster
{kind=link}
Abstract
Accurate camera motion estimation is essential for recovering global human motion in world coordinates from RGB video inputs. While SLAM is widely used for estimating camera trajectory and point cloud, monocular SLAM does so only up to an unknown scale factor. Previous works estimate the scale factor through optimization, but this is unreliable and time-consuming. This paper presents an optimization-free scale calibration framework, Human as Checkerboard (HAC). HAC explicitly leverages the human body predicted by human mesh recovery model as a calibration reference. Specifically, it innovatively uses the absolute depth of human-scene contact joints as references to calibrate the corresponding relative scene depth from SLAM. HAC benefits from geometric priors encoded in human mesh recovery models to estimate the SLAM scale and achieves precise global human motion estimation. Simple yet powerful, our method sets a new state-of-the-art performance for global human mesh estimation tasks. It reduces motion errors by 50\% over prior local-to-global methods while using 100$\times$ less post-SLAM inference time than optimization-based methods. Our code will be made public.
Chat is not available.
Successful Page Load