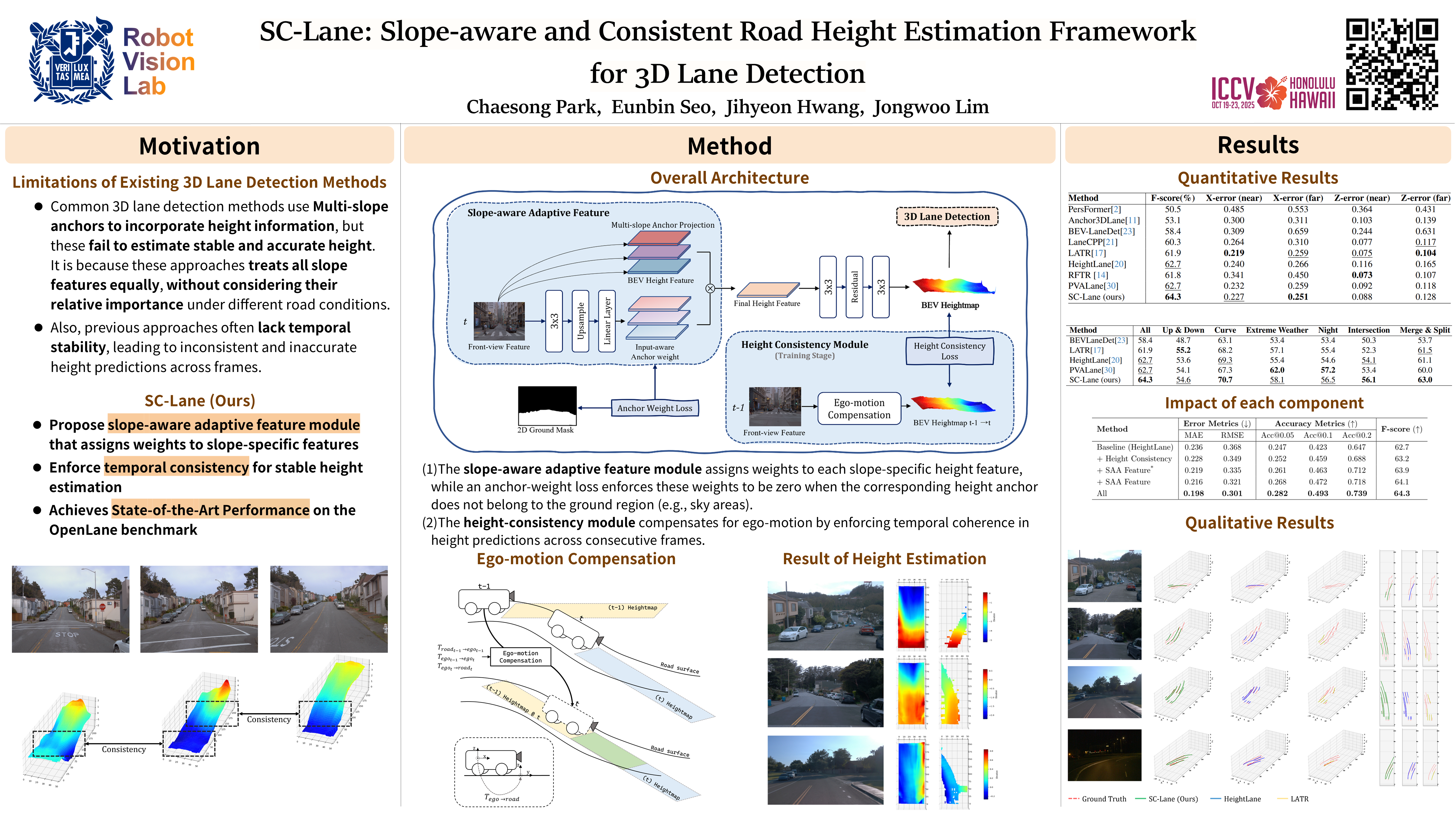
SC-Lane: Slope-aware and Consistent Road Height Estimation Framework for 3D Lane Detection
{kind=link}
Abstract
In this paper, we introduce SC-Lane, a novel slope-aware and temporally consistent heightmap estimation framework for 3D lane detection. Unlike previous approaches that rely on fixed slope anchors, SC-Lane adaptively determines the optimal fusion of slope-specific height features, improving robustness to diverse road geometries. To achieve this, we propose a Slope-Aware Adaptive Feature module that dynamically predicts the optimal weights for integrating multi-slope representations into a unified heightmap. Additionally, a Height Consistency Module enforces temporal coherence, ensuring stable and accurate height estimation across consecutive frames, which is crucial for real-world driving scenarios.To evaluate the effectiveness of SC-Lane, we introduce a LiDAR-derived heightmap dataset and adopt standard evaluation metrics, including Mean Absolute Error (MAE), Root Mean Squared Error (RMSE), and threshold-based accuracy. While these metrics are widely used in surface and depth estimation, their application to road height estimation has been underexplored. Extensive experiments on the OpenLane benchmark demonstrate that SC-Lane significantly improves both height estimation and 3D lane detection, achieving state-of-the-art performance with an F-score of 64.3% — outperforming existing methods by a notable margin. These results highlight SC-Lane’s potential for enhancing the reliability of autonomous driving perception.The code and dataset used in this study will be made publicly available upon publication.