When Anchors Meet Cold Diffusion: A Multi-Stage Approach to Lane Detection
{kind=link}
Abstract
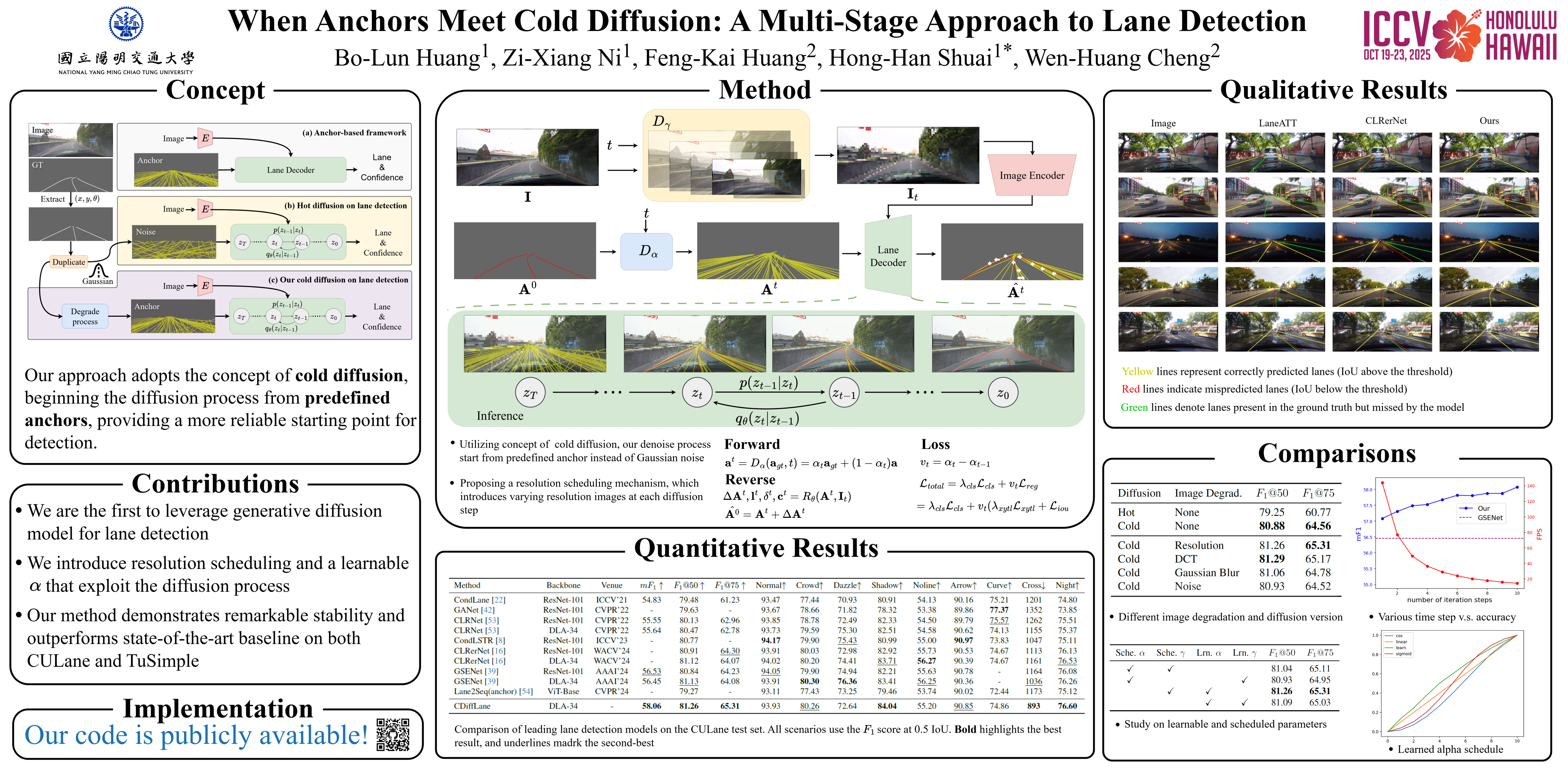
Accurate and stable lane detection is crucial for the reliability of autonomous driving systems. A core challenge lies in predicting lane positions in complex scenarios, such as curved roads or when markings are ambiguous or absent.Conventional approaches leverage deep learning techniques to extract both high-level and low-level visual features, aiming to achieve a comprehensive understanding of the driving environment. However, these methods often rely on predefined anchors within a single-pass model, limiting their adaptability. The one-shot prediction paradigm struggles with precise lane estimation in challenging scenarios, such as curved roads or adverse conditions like low visibility at night.To address these limitations, we propose a novel cold diffusion-based framework that initializes lane predictions with predefined anchors and iteratively refines them. This approach retains the flexibility and progressive refinement capabilities of diffusion models while overcoming the constraints of traditional hot diffusion techniques.To further enhance the model’s coarse-to-fine refinement capabilities, we introduce a multi-resolution image processing strategy, where images are analyzed at different timesteps to capture both global and local lane structure details. Besides, we incorporate a learnable noise variance schedule, enabling the model to dynamically adjust its learning process based on multi-resolution inputs.Experimental results demonstrate that our method significantly improves detection accuracy across a variety of challenging scenarios, outperforming state-of-the-art lane detection methods.