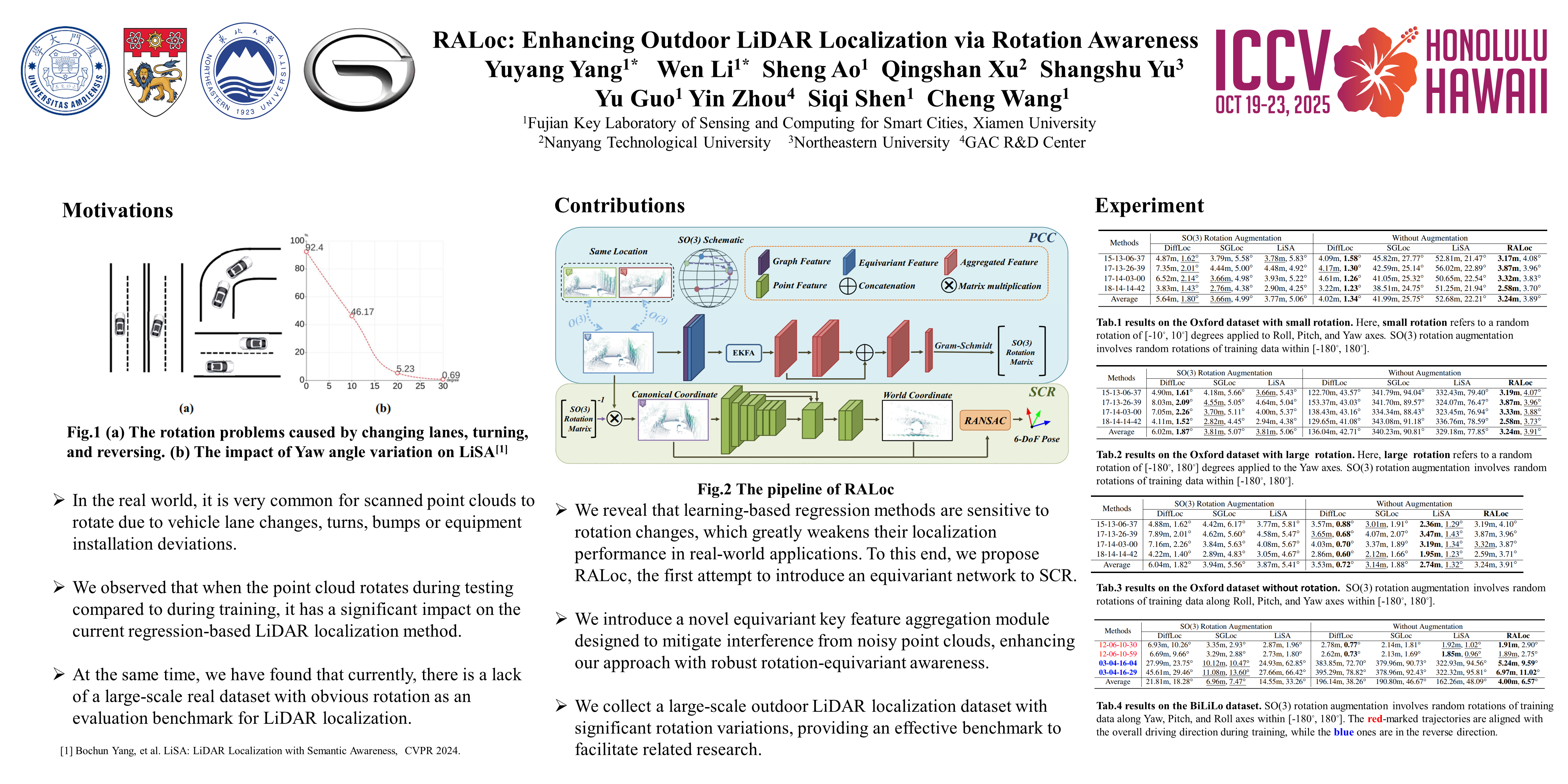
RALoc: Enhancing Outdoor LiDAR Localization via Rotation Awareness
Yuyang Yang ⋅ Wen Li ⋅ Sheng Ao ⋅ Qingshan Xu ⋅ Shangshu Yu ⋅ guo yu ⋅ Yin Zhou ⋅ Siqi Shen ⋅ Cheng Wang
 Highlight
Highlight
2025 Poster
{kind=link}
Abstract
LiDAR localization is a fundamental task in autonomous driving and robotics. Scene Coordinate Regression (SCR) exhibits leading pose accuracy, achieving impressive results in learning-based localization. We observe that the real-world LiDAR scans captured from different viewpoints usually result in the catastrophic collapse of SCR. However, existing LiDAR localization methods have largely overlooked the issue of rotation sensitivity in SCR. In this paper, we present RALoc, an outdoor LiDAR localization method with rotation awareness to achieve accurate localization. The key to our approach is to design a Point Cloud Canonicalization module, which leverages a powerful equivariant key feature aggregation to transform the input LiDAR scan towards a consistent orientation, effectively eliminating the adverse effects of rotation. This proposed module has promising scalability and can be seamlessly integrated with the existing LiDAR localization network. Moreover, we propose the $\textbf{Bi}$directional $\textbf{Li}$DAR $\textbf{Lo}$calization (BiLiLo) dataset as a benchmark to evaluate the performance of various methods in large outdoor scenes with significant rotation changes. Extensive experiments show that RALoc significantly improves localization performance in scenarios with large rotation changes, and also achieves competitive performance in the Oxford Radar RobotCar dataset. Our code and dataset will be released upon acceptance.
Chat is not available.
Successful Page Load