Towards Accurate and Efficient 3D Object Detection for Autonomous Driving: A Mixture of Experts Computing System on Edge
{kind=link}
Abstract
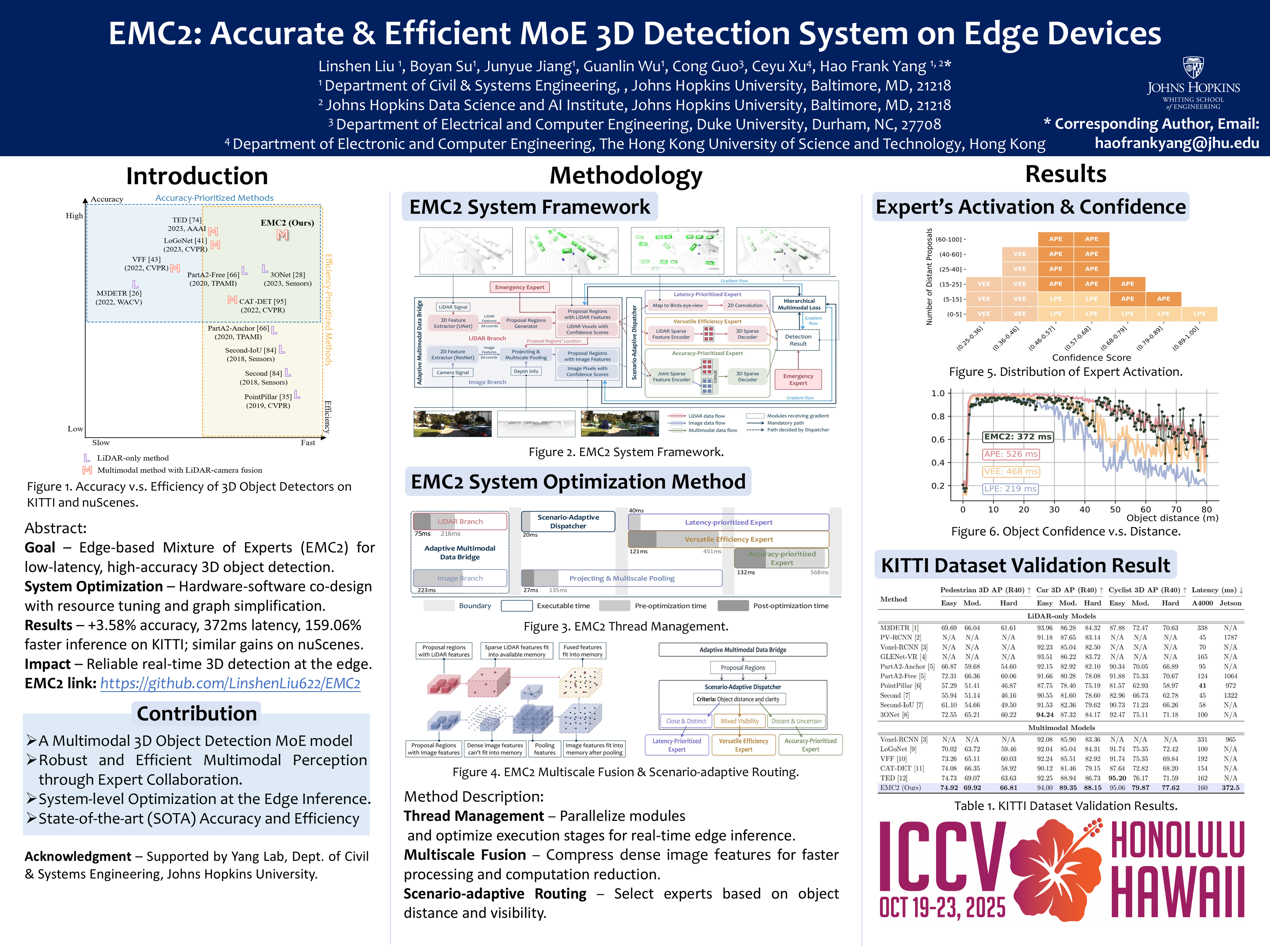
The paper introduces Edge-based Mixture-of-Experts (MoE) Collaborative Computing (EMC2) system, the first multimodal MoE framework designed to address the conflicting requirements of low latency and high accuracy in diverse traffic scenarios for autonomous driving safety. EMC2’s key innovation is its scenario-aware computing architecture optimized for edge devices, which adaptively fuses LiDAR and image inputs by leveraging the complementary strengths of sparse 3D point clouds and dense 2D pixel grids. Specifically, an adaptive multimodal data bridge is designed that preprocesses LiDAR and image data using customized multi-scale pooling. A scenario-adaptive dispatcher then routes these fused features to specialized experts based on the object clarity and distance. Three collaborative expert models with complementary encoder-decoder architectures are designed and trained using a novel hierarchical multimodal loss and balanced sampling strategies. Then, in the inference stage, the EMC2 incorporates hardware-software co-optimization, spanning CPU thread allocation, GPU memory management, and computational graph optimization, to collaboratively enable efficient deployment on edge computing devices. Extensive evaluations conducted on open-source datasets demonstrate EMC2's superior performance, achieving an average accuracy improvement of 3.58% and an impressive 159.06% inference speedup compared to 15 leading methods on Jetson platforms. Such enhancements clearly meet the real-time operational expectations for autonomous vehicles, directly contributing to safer future transportation.