Learning on the Go: A Meta-learning Object Navigation Model
{kind=link}
Abstract
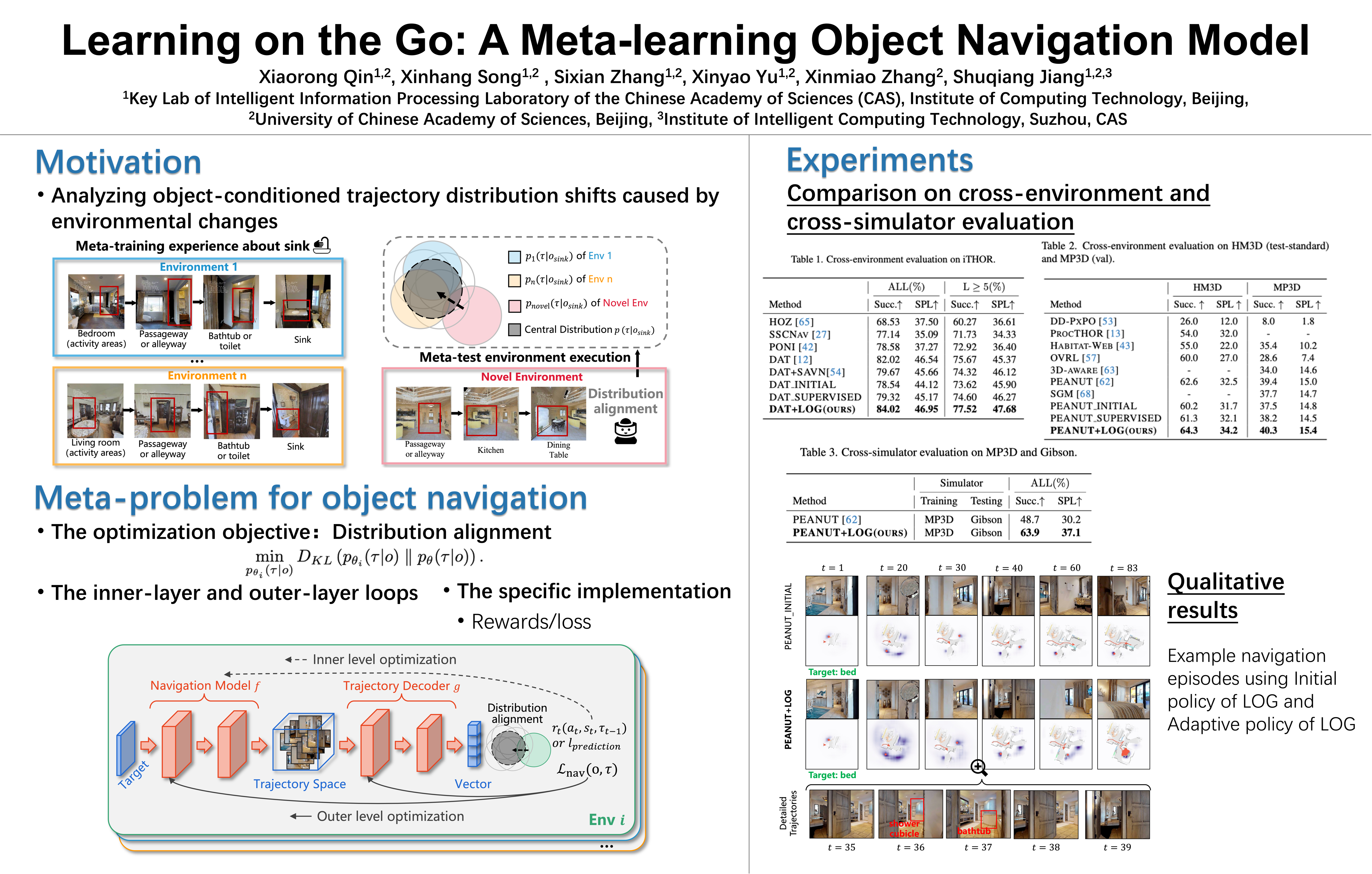
Object navigation tasks require an agent to locate a target object using visual observations in unseen environments, where unfamiliar layouts and novel object appearances can hinder navigation. Most existing methods lack the adaptability needed to handle these uncertainties, as their navigation models remain fixed during testing. In this paper, we address this challenge by examining object-conditioned trajectory distribution shifts in navigation caused by changes in environmental dynamics. We propose learning a central conditional distribution as a prior that approximates the specific distributions of diverse environments. To retain environment-specific information during navigation, we allow each environment-specific distribution to approximate this central distribution rather than relying on it directly. To implement this, we introduce a meta-learning mechanism that integrates with traditional navigation methods, offering tailored solutions for various types of navigation approaches. Our approach, Learning on the Go (LOG), enables agents to learn on the go, allowing for flexible, adaptive, real-time learning during navigation. Our theoretical analysis highlights the benefits of learning a central distribution for effective generalization across environments, and empirical results confirm the proposed method’s effectiveness, demonstrating superior performance compared to existing approaches.