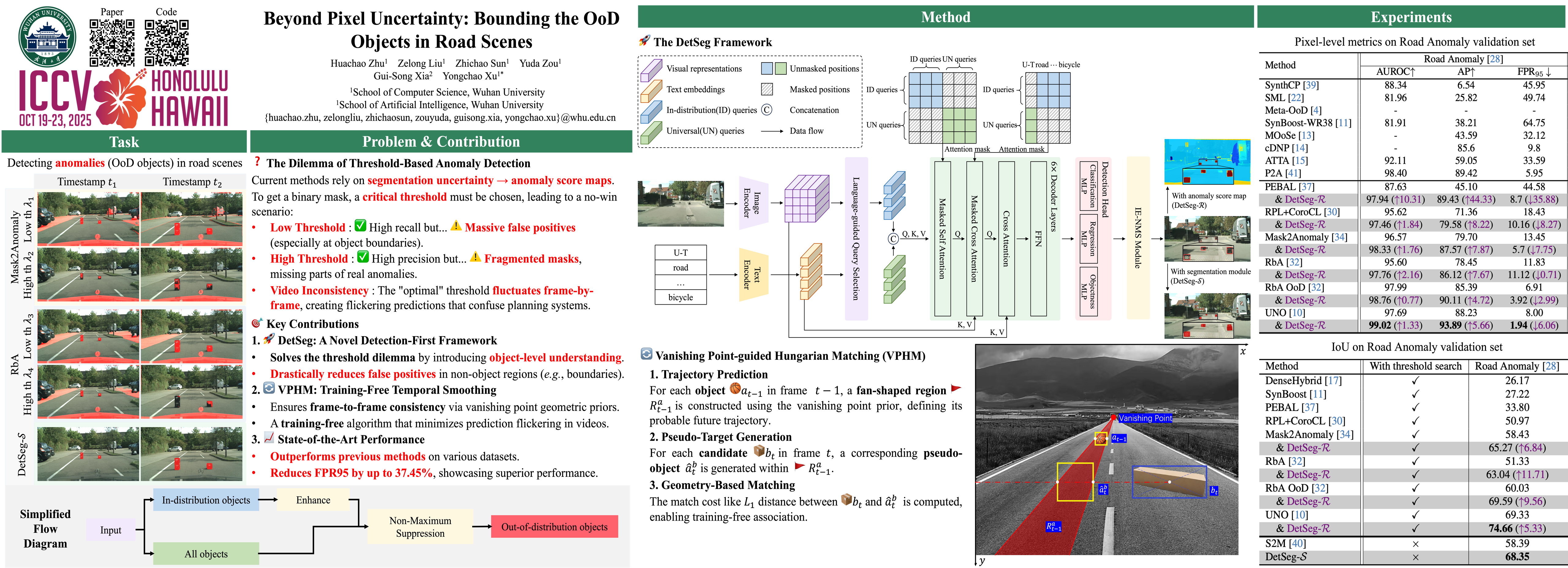
Beyond Pixel Uncertainty: Bounding the OoD Objects in Road Scenes
Huachao Zhu ⋅ Zelong Liu ⋅ Zhichao Sun ⋅ Yuda Zou ⋅ Gui-Song Xia ⋅ Yongchao Xu
2025 Poster
{kind=link}
Abstract
Recognizing out-of-distribution (OoD) objects on roads is crucial for safe driving. Most existing methods rely on segmentation models' uncertainty as anomaly scores, often resulting in false positives - especially at ambiguous regions like boundaries, where segmentation models inherently exhibit high uncertainty. Additionally, it is challenging to define a suitable threshold to generate anomaly masks, especially with the inconsistencies in predictions across consecutive frames. We propose DetSeg, a novel paradigm that helps incorporate object-level understanding. DetSeg first detects all objects in the open world and then suppresses in-distribution (ID) bounding boxes, leaving only OoD proposals. These proposals can either help previous methods eliminate false positives (DetSeg-$\mathcal{R}$), or generate binary anomaly masks without complex threshold search when combined with a box-prompted segmentation module (DetSeg-$\mathcal{S}$).Additionally, we introduce vanishing point guided Hungarian matching (VPHM) to smooth the prediction results within a video clip, mitigating abrupt variations of predictions between consecutive frames. Comprehensive experiments on various benchmarks demonstrate that DetSeg significantly improves performance, reducing the FPR$\it{_{95}}$ of previous methods by up to 37.45\%, offering a more robust and practical solution for this domain.
Chat is not available.
Successful Page Load