DCHM: Depth-Consistent Human Modeling for Multiview Detection
{kind=link}
Abstract
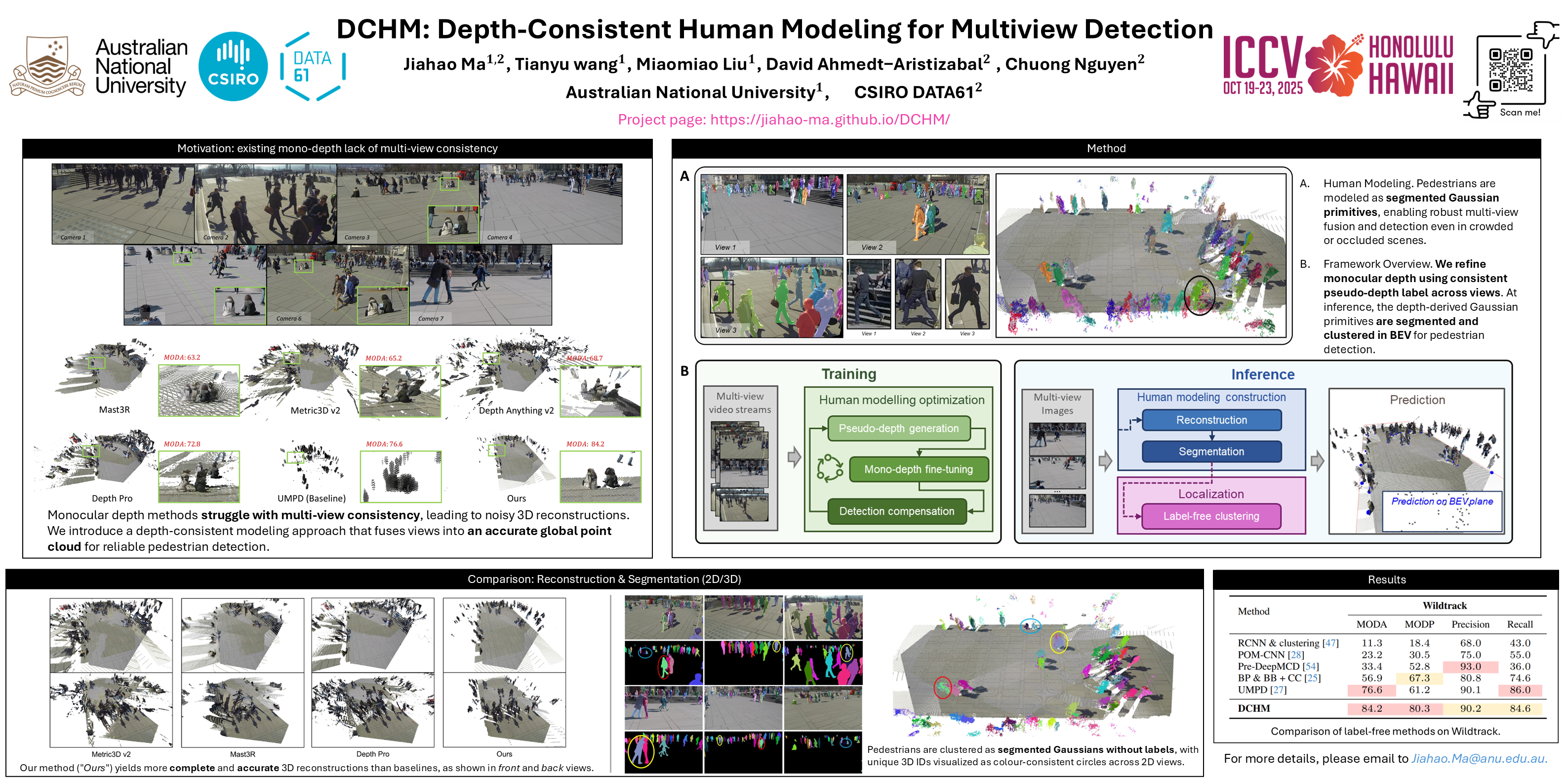
Multiview pedestrian detection typically involves two stages: human modeling and pedestrian localization. Human modeling represents pedestrians in 3D space by fusing multiview information, making its quality crucial for detection accuracy. However, existing methods often introduce noise and have low precision. While some approaches reduce noise by fitting on costly multiview 3D annotations, they often struggle to generalize across diverse scenes. To eliminate reliance on human-labeled annotations and accurately model humans, we propose Depth-Consistency Human Modeling (DCHM), a framework designed for consistent depth estimation and multiview fusion in global coordinates. Specifically, our proposed pipeline iteratively achieves multiview depth consistency in sparse-view, large-scaled, and crowded scenarios, producing precise point clouds for pedestrian localization. Extensive experiments demonstrate that our method significantly reduces noise during human modeling, outperforming previous state-of-the-art baselines. Additionally, to the best of our knowledge, we are the first to reconstruct pedestrians and perform multiview segmentation in such a challenging setting.