DAMap: Distance-aware MapNet for High Quality HD Map Construction
{kind=link}
Abstract
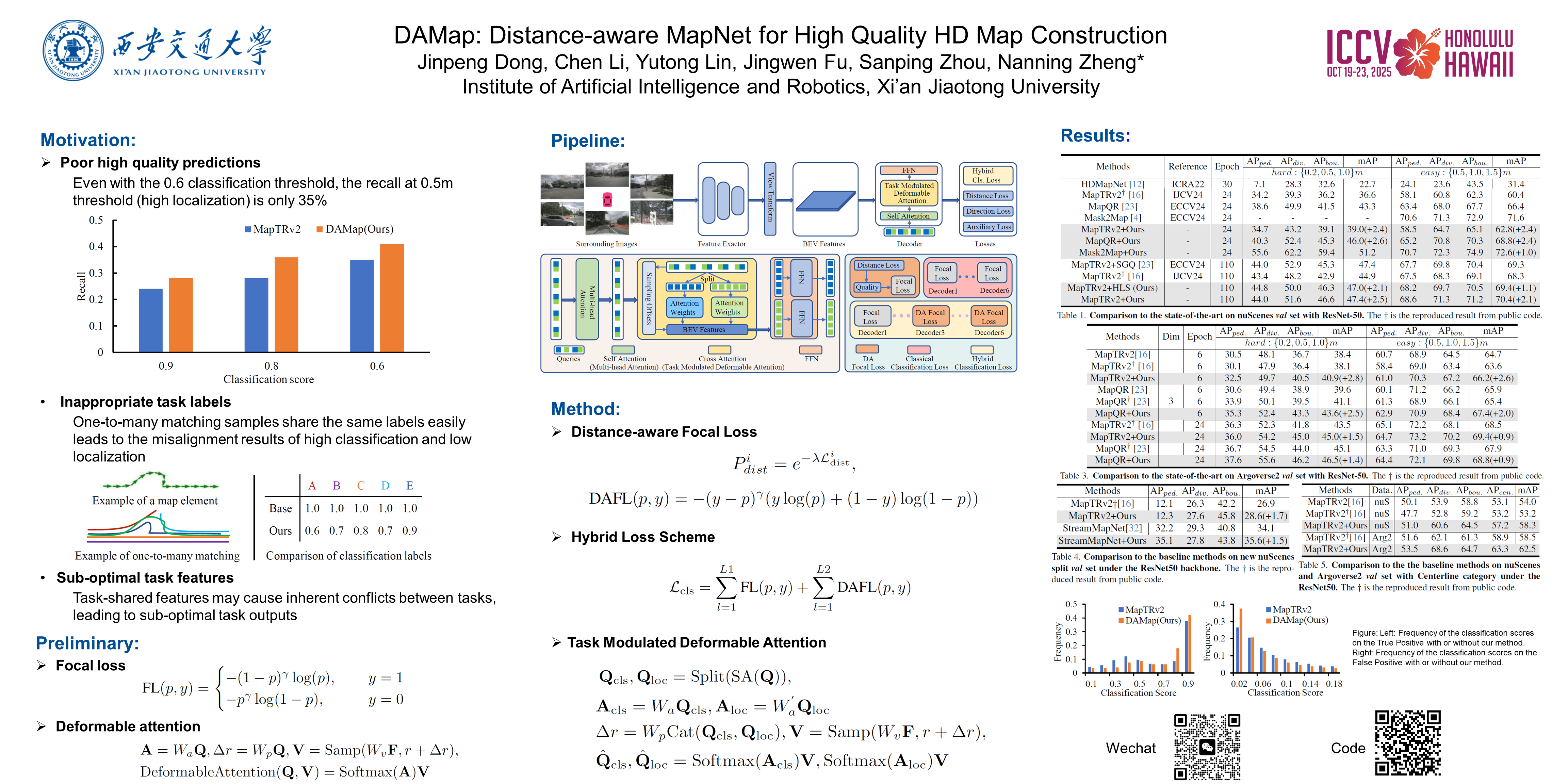
High-definition (HD) map is an important component to support navigation and planning for autonomous driving vehicles. Predicting map elements with high quality (high classification and localization scores) is crucial to the safety of autonomous driving vehicles. However, current methods perform poorly in high quality predictions. Two main factors are responsible for this: 1) inappropriate classification labels due to one-to-many matching queries shared labels, and 2) sub-optimal task features due to tasks shared sampling features.In this paper, we reveal two inherent defects in current methods and develop a novel HD map construction method named DAMap to address these problems. Specifically, DAMap consists of three components: Distance-aware Focal Loss (DAFL), Hybrid Loss Scheme (HLS), and Task Modulated Deformable Attention (TMDA). The DAFL is introduced to assign appropriate classification labels for one-to-many matching samples. The TMDA is proposed to obtain discriminative task-specific features. Furthermore, HLS is proposed to better utilize the advantages of the proposed DAFL. We perform extensive experiments and consistently achieve performance improvement on the NuScenes and Argoverse2 benchmarks under different metrics, baselines, splits, backbones, and schedules.