Power of Cooperative Supervision: Multiple Teachers Framework for Advanced 3D Semi-Supervised Object Detection
{kind=link}
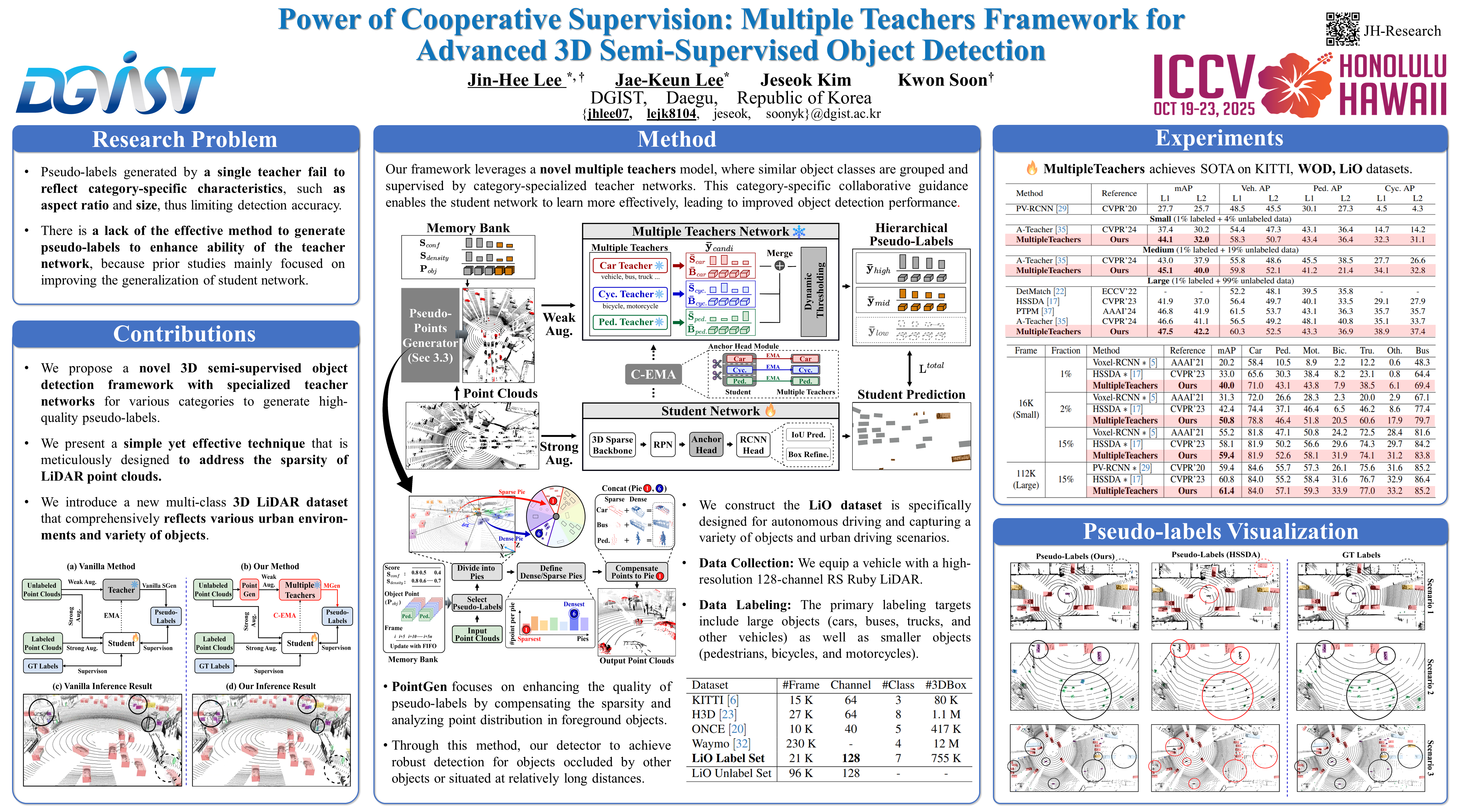
Abstract
To ensure safe autonomous driving in complex urban environments, it is essential not only to develop high-performance object detection models but also to establish a diverse and representative dataset that captures a wide range of urban scenarios and object characteristics. To address these challenges, we introduce a new multi-class 3D LiDAR dataset that comprehensively reflects various urban environments and object types, along with a robust semi-supervised 3D object detection (SSOD) framework. Our SSOD framework leverages a novel multiple teachers model, where similar object classes are grouped and supervised by category-specialized teacher networks. This category-specific collaborative guidance enables the student network to learn more effectively, leading to improved object detection performance. Additionally, we propose the Pseudo-points Generator (PointGen), a simple yet effective technique designed to enhance the generation of high-quality pseudo-labels for the teacher network, mitigating the impact of sparse LiDAR point clouds. Extensive experiments on the Waymo Open Dataset, KITTI, and our newly introduced dataset validate the effectiveness of both our dataset and SSOD framework. Experimental results demonstrate that our approach consistently outperforms state-of-the-art 3D SSOD methods across all evaluated datasets. To encourage further research in this domain, we will publicly release our multi-class LiDAR dataset and source code on our GitHub repository.