AdaDrive: Self-Adaptive Slow-Fast System for Language-Grounded Autonomous Driving
{kind=link}
Abstract
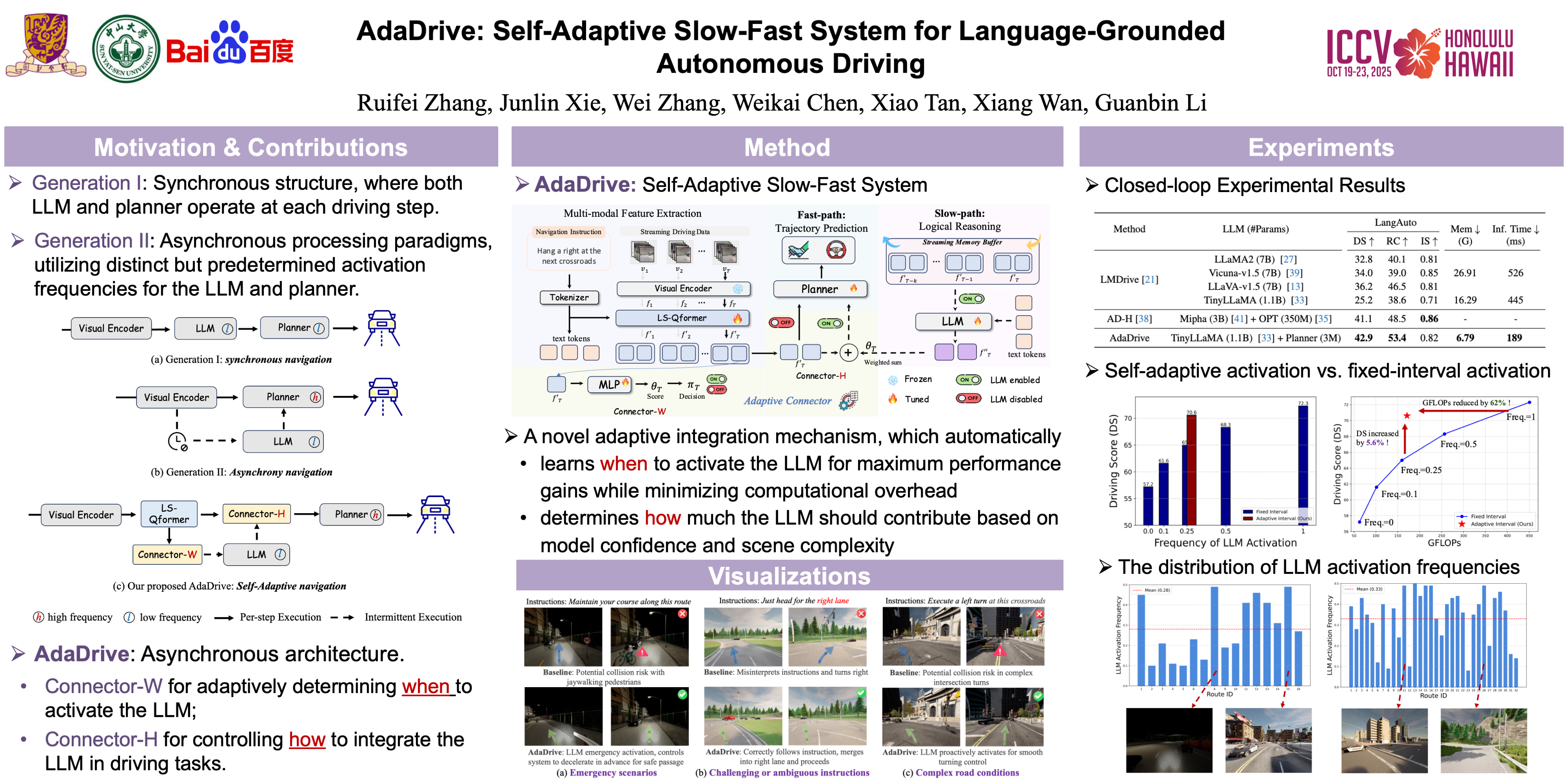
Effectively integrating Large Language Models (LLMs) into autonomous driving requires a balance between leveraging high-level reasoning and maintaining real-time efficiency. Existing approaches either activate LLMs too frequently, causing excessive computational overhead, or use fixed schedules, failing to adapt to dynamic driving conditions. To address these challenges, we propose AdaDrive, an adaptively collaborative slow-fast framework that optimally determines when and how LLMs contribute to decision-making. (1) \textbf{When} to activate the LLM: AdaDrive employs a novel adaptive activation loss that dynamically determines LLM invocation based on a comparative learning mechanism, ensuring activation only in complex or critical scenarios. (2) \textbf{How} to integrate LLM assistance: Instead of rigid binary activation, AdaDrive introduces an adaptive fusion strategy that modulates a continuous, scaled LLM influence based on scene complexity and prediction confidence, ensuring seamless collaboration with conventional planners.Through these strategies, AdaDrive provides a flexible, context-aware framework that maximizes decision accuracy without compromising real-time performance. Extensive experiments on language-grounded autonomous driving benchmarks demonstrate that AdaDrive state-of-the-art performance in terms of both driving accuracy and computational efficiency.