AdvDreamer Unveils: Are Vision-Language Models Truly Ready for Real-World 3D Variations?
 Highlight
Highlight
{kind=link}
Abstract
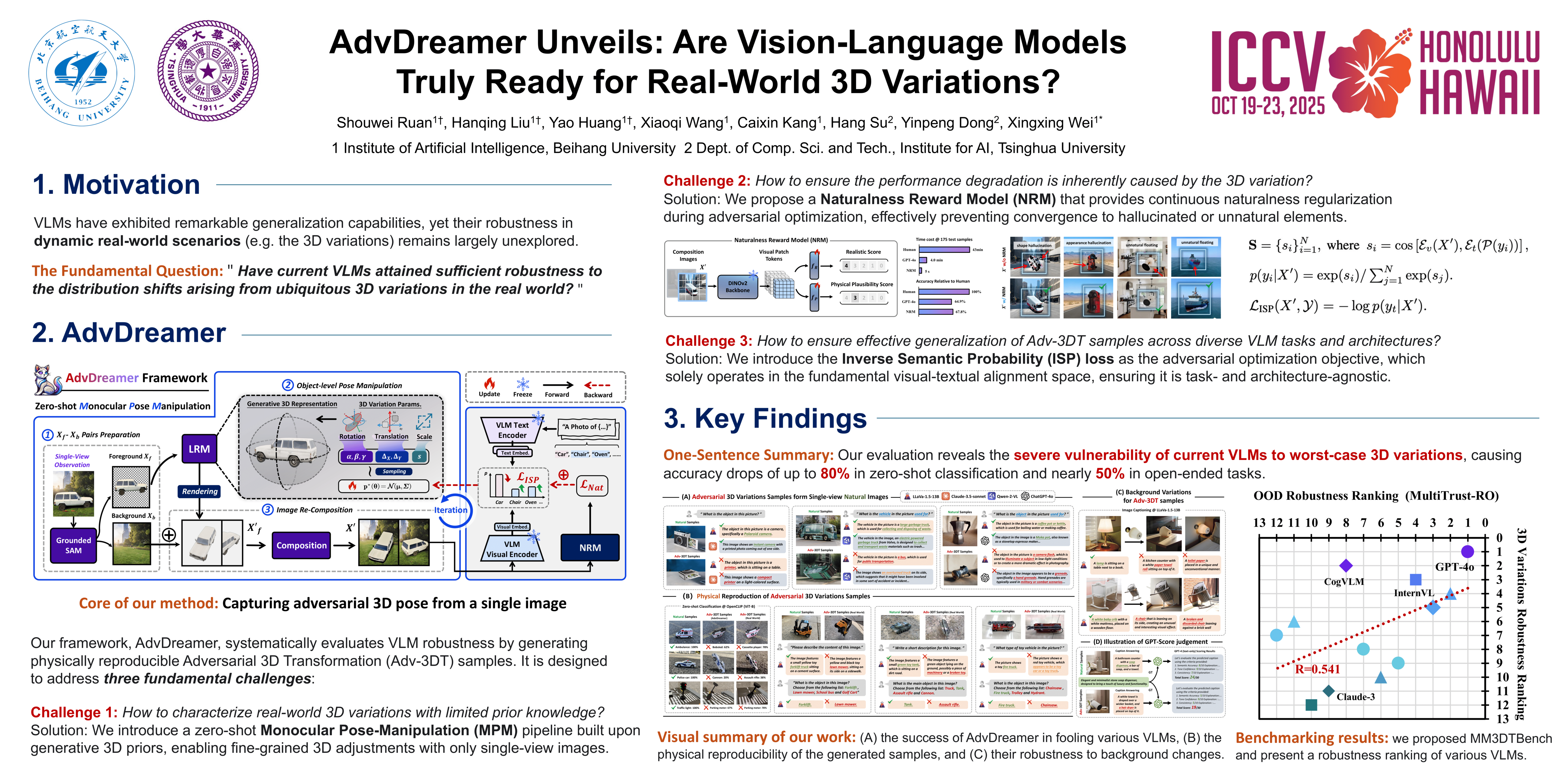
Vision Language Models (VLMs) have exhibited remarkable generalization capabilities, yet their robustness in dynamic real-world scenarios remains largely unexplored. To systematically evaluate VLMs' robustness to real-world 3D variations, we propose AdvDreamer, the first framework capable of generating physically reproducible Adversarial 3D Transformation (Adv-3DT) samples from single-view observations. In AdvDreamer, we integrate three key innovations: Firstly, to characterize real-world 3D variations with limited prior knowledge precisely, we design a zero-shot Monocular Pose Manipulation pipeline built upon generative 3D priors. Secondly, to ensure the visual quality of worst-case Adv-3DT samples, we propose Naturalness Reward Model that provides continuous naturalness regularization during adversarial optimization, effectively preventing convergence to hallucinated or unnatural elements. Thirdly, to enable systematic evaluation across diverse VLM architectures and visual-language tasks, we introduce the Inverse Semantic Probability loss as the adversarial optimization objective, which solely operates in the fundamental visual-textual alignment space. Based on the captured Adv-3DT samples with high aggressiveness and transferability, we establish MM3DTBench, the first VQA benchmark dataset tailored to evaluate VLM robustness under challenging 3D variations. Extensive evaluations of representative VLMs with varying architectures reveal that real-world 3D variations can pose severe threats to model performance across various tasks.