DistillDrive: End-to-End Multi-Mode Autonomous Driving Distillation by Isomorphic Hetero-Source Planning Model
{kind=link}
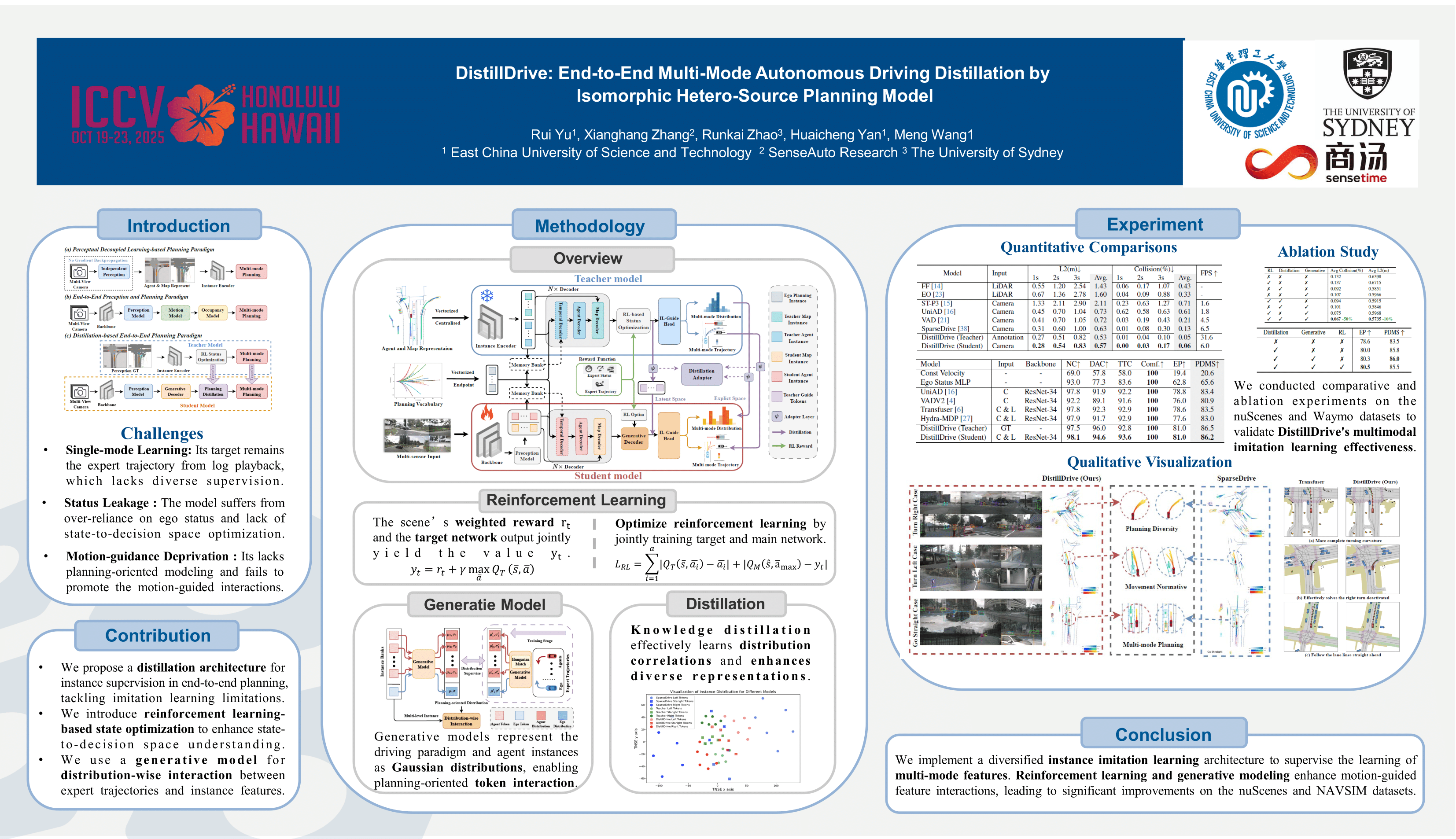
Abstract
End-to-end autonomous driving has been recently seen rapid development, exerting a profound influence on both industry and academia. However, the existing work places excessive focus on ego-vehicle status as their sole learning objectives and lacks of planning-oriented understanding, which limits the robustness of the overall decision-making prcocess. In this work, we introduce DistillDrive, an end-to-end knowledge distillation-based autonomous driving model that leverages diversified instance imitation to enhance multi-mode motion feature learning. Specifically, we employ a planning model based on structured scene representations as the teacher model, leveraging its diversified planning instances as multi-objective learning targets for the end-to-end model. Moreover, we incorporate reinforcement learning to enhance the optimization of state-to-decision mappings, while utilizing generative modeling to construct planning-oriented instances, fostering intricate interactions within the latent space. We validate our model on the nuScenes and NAVSIM datasets, achieving a 50\% reduction in collision rate and a 3-point improvement in closed-loop performance compared to the baseline model.