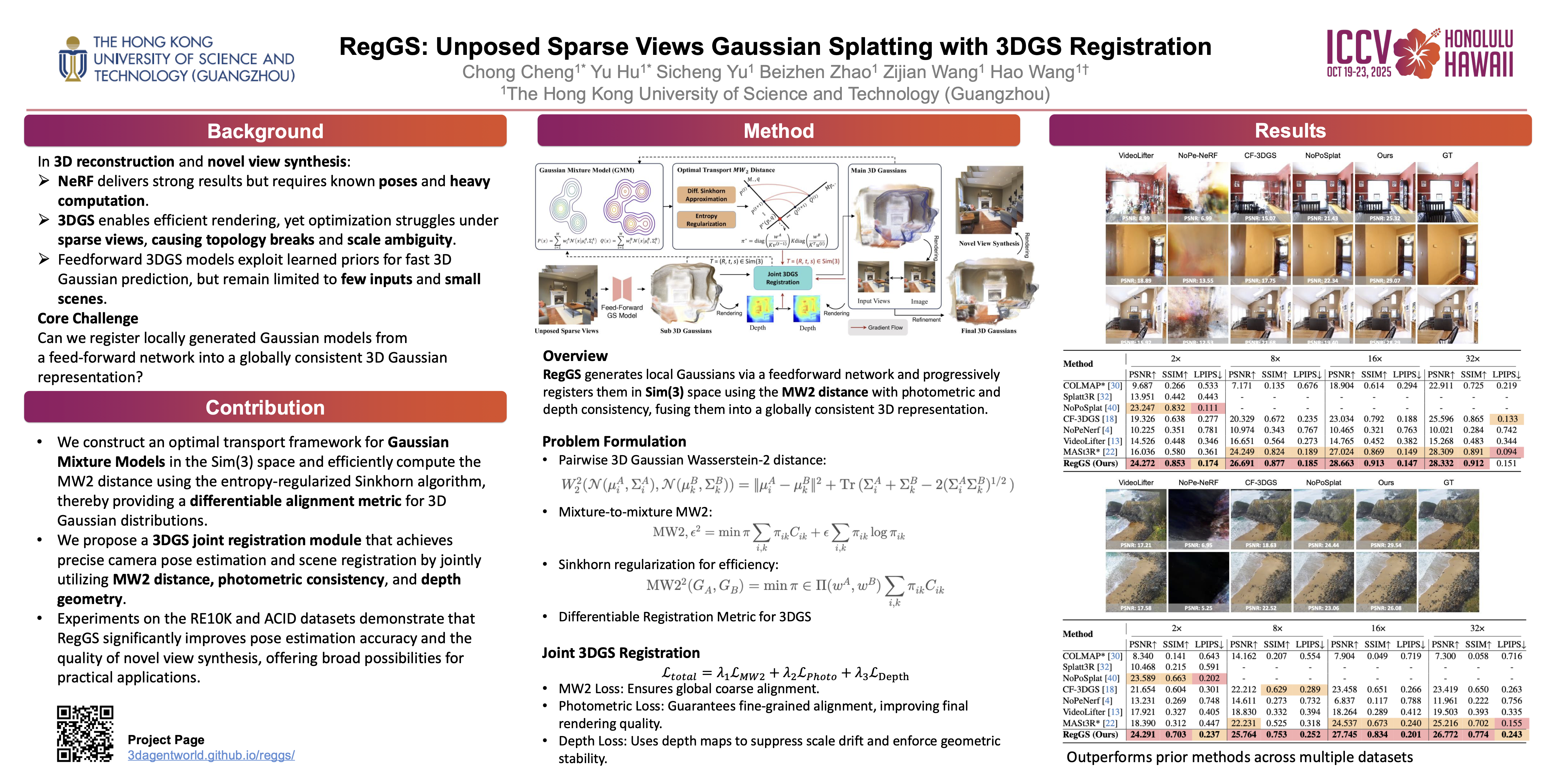
RegGS: Unposed Sparse Views Gaussian Splatting with 3DGS Registration
Chong Cheng ⋅ Yu Hu ⋅ Sicheng Yu ⋅ Beizhen ZHAO ⋅ Zijian Wang ⋅ Hao Wang
2025 Poster
{kind=link}
Abstract
3D Gaussian Splatting (3DGS) has demonstrated its potential in reconstructing scenes from unposed images. However, optimization-based 3DGS methods struggle with sparse views due to limited prior knowledge. Meanwhile, feed-forward Gaussian approaches are constrained by input formats, making it challenging to incorporate more input views. To address these challenges, we propose RegGS, a 3D Gaussian registration-based framework for reconstructing unposed sparse views. RegGS aligns local 3D Gaussians generated by a feed-forward network into a globally consistent 3D Gaussian representation. Technically, we implement an entropy-regularized Sinkhorn algorithm to efficiently solve the optimal transport Mixture 2-Wasserstein $(\text{MW}_2)$ distance, which serves as an alignment metric for Gaussian mixture models (GMMs) in $\mathrm{Sim}(3)$ space. Furthermore, we design a joint 3DGS registration module that integrates the $\text{MW}_2$ distance, photometric consistency, and depth geometry. This enables a coarse-to-fine registration process while accurately estimating camera poses and aligning the scene. Experiments on the \textit{RE10K} and \textit{ACID} datasets demonstrate that RegGS effectively registers local Gaussians with high fidelity, achieving precise pose estimation and high-quality novel-view synthesis.
Chat is not available.
Successful Page Load