Ultra-Precision 6DoF Pose Estimation Using 2-D Interpolated Discrete Fourier Transform
{kind=link}
Abstract
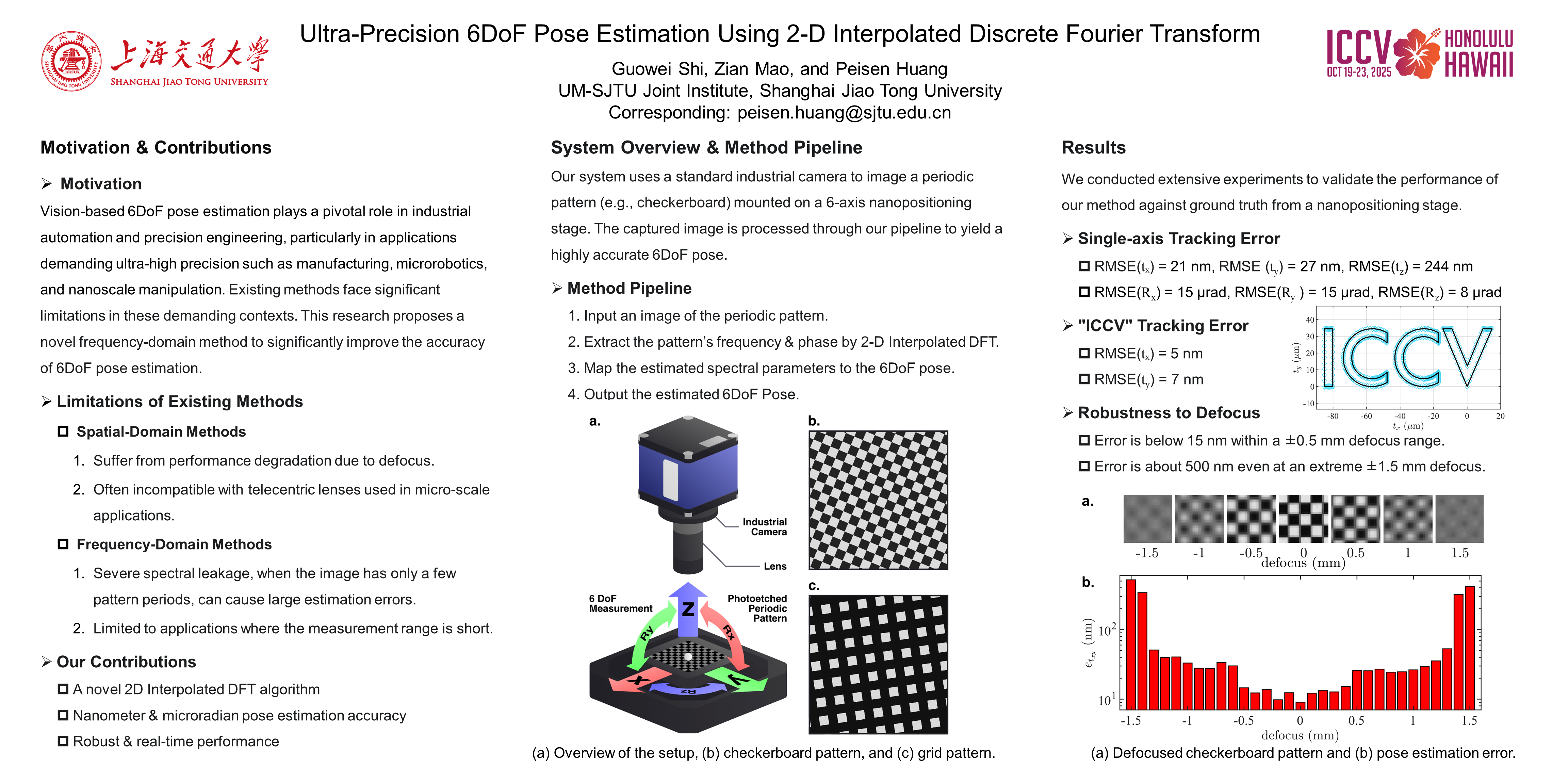
Ultra-precision measurement of 6DoF pose is essential in applications such as semiconductor manufacturing and nanoscale manipulation. Conventional vision‐based techniques are often hampered by sensitivity to defocus, limited number of periods when using images of periodical patterns, etc. In this paper, we propose a novel two-dimensional interpolated Discrete Fourier Transform (2D-IpDFT) method for robust 6DoF pose estimation using periodic patterns. We further develop a mathematical framework that links image parameters—phase and frequency—to 6DoF pose, which is applicable to both orthographic and quasi-orthographic imaging systems. Extensive experiments on a low-cost setup, featuring an industrial camera and etched periodic patterns, demonstrate nanometer-level translational accuracy and microradian-level rotational precision.