Deterministic Object Pose Confidence Region Estimation
{kind=link}
Abstract
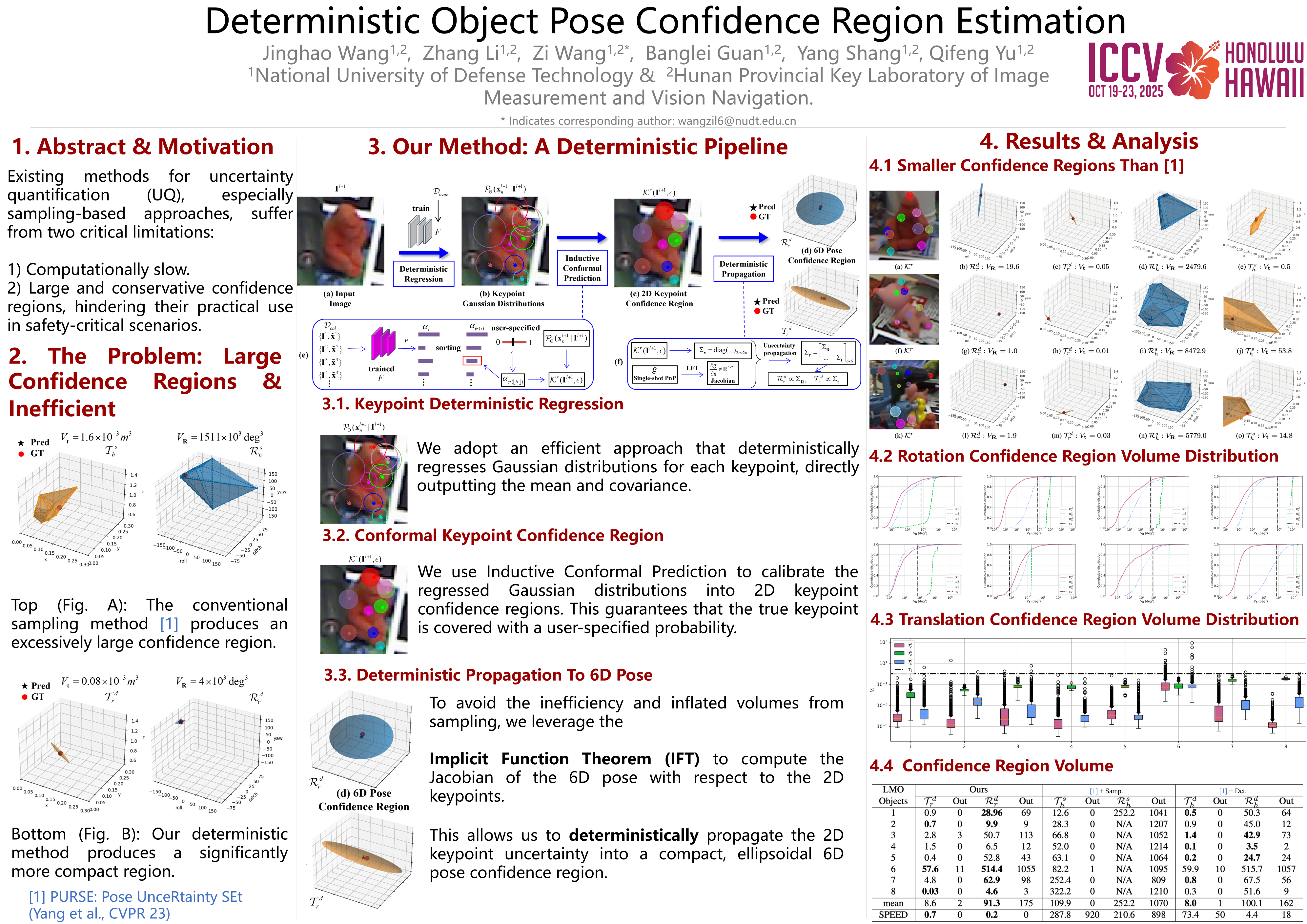
Recently, 6D pose confidence region estimation has emerged as a critical direction, aiming to perform uncertainty quantification for assessing the reliability of estimated poses. However, current sampling-based approach suffers from critical limitations that severely impede their practical deployment: 1) the sampling speed significantly decreases as the number of samples increases. 2) the derived confidence regions are often excessively large. To address these challenges, we propose a deterministic and efficient method for estimating pose confidence regions. Our approach uses inductive conformal prediction to calibrate the deterministically regressed Gaussian keypoint distributions into 2D keypoint confidence regions. We then leverage the implicit function theorem to propagate these keypoint confidence regions directly into 6D pose confidence regions. This method avoids the inefficiency and inflated region sizes associated with sampling and ensembling, providing compact confidence regions that cover the ground-truth poses with a user-defined confidence level. Experimental results on the LineMOD Occlusion and SPEED datasets show that our method achieves higher pose estimation accuracy with reduced computational time. For the same coverage rate, our method yields significantly smaller confidence region volumes, reducing them by up to 99.9% for rotations and 99.8% for translations. The code will be available soon.