Dynamic Reconstruction of Hand-Object Interaction with Distributed Force-aware Contact Representation
{kind=link}
Abstract
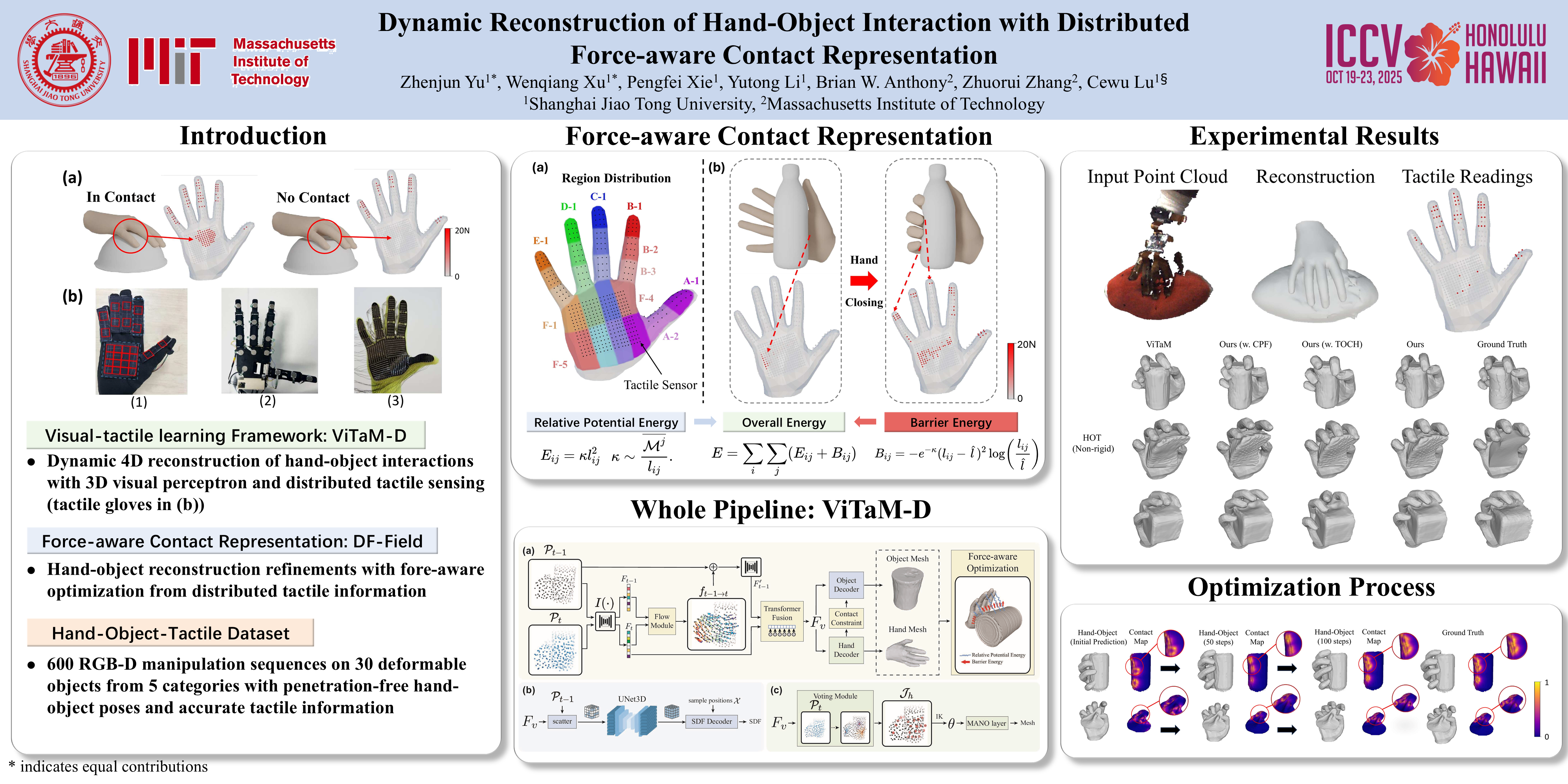
We present ViTaM-D, a novel visual-tactile framework for reconstructing dynamic hand-object interaction with distributed tactile sensing to enhance contact modeling. Existing methods, relying solely on visual inputs, often fail to capture occluded interactions and object deformation. To address this, we introduce DF-Field, a distributed force-aware contact representation leveraging kinetic and potential energy in hand-object interactions. ViTaM-D first reconstructs interactions using a visual network with contact constraint, then refines contact details through force-aware optimization, improving object deformation modeling. To evaluate deformable object reconstruction, we introduce the HOT dataset, featuring 600 hand-object interaction sequences in a high-precision simulation environment. Experiments on DexYCB and HOT datasets show that ViTaM-D outperforms state-of-the-art methods in reconstruction accuracy for both rigid and deformable objects. DF-Field also proves more effective in refining hand poses and enhancing contact modeling than previous refinement methods. The code, models, and datasets will be made public.