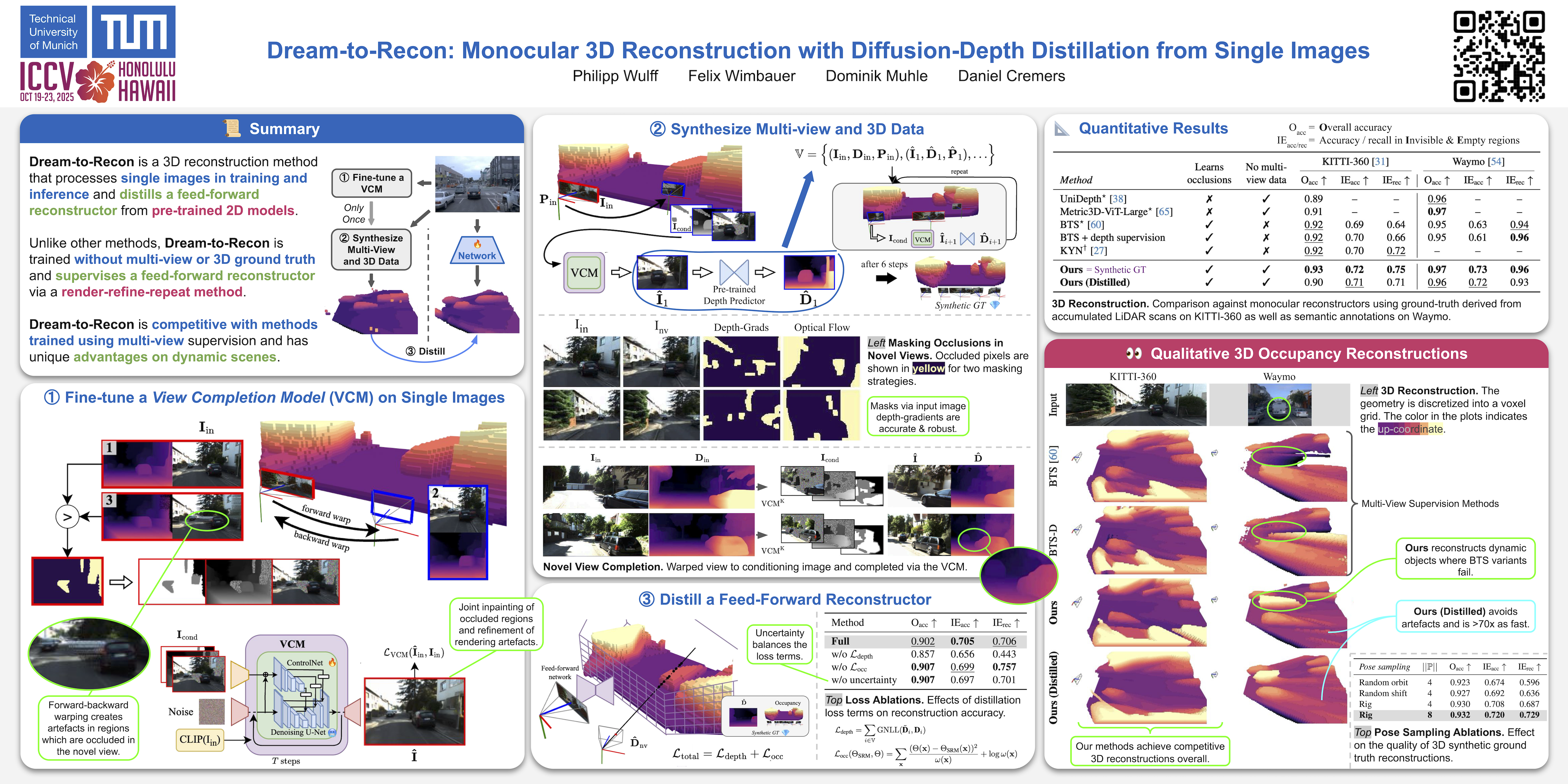
Dream-to-Recon: Monocular 3D Reconstruction with Diffusion-Depth Distillation from Single Images
Philipp Wulff ⋅ Felix Wimbauer ⋅ Dominik Muhle ⋅ Daniel Cremers
2025 Poster
{kind=link}
Abstract
Volumetric scene reconstruction from a single image is crucial for a broad range of applications like autonomous driving and robotics. Recent volumetric reconstruction methods achieve impressive results, but generally require expensive 3D ground truth or multi-view supervision. We propose to leverage pre-trained 2D diffusion models and depth prediction models to generate synthetic scene geometry from a single image. This can then be used to distill a feed-forward scene reconstruction model. Our experiments on the challenging KITTI-360 and Waymo datasets demonstrate that our method matches or outperforms state-of-the-art baselines that use multi-view supervision, and offers unique advantages, for example regarding dynamic scenes.
Chat is not available.
Successful Page Load