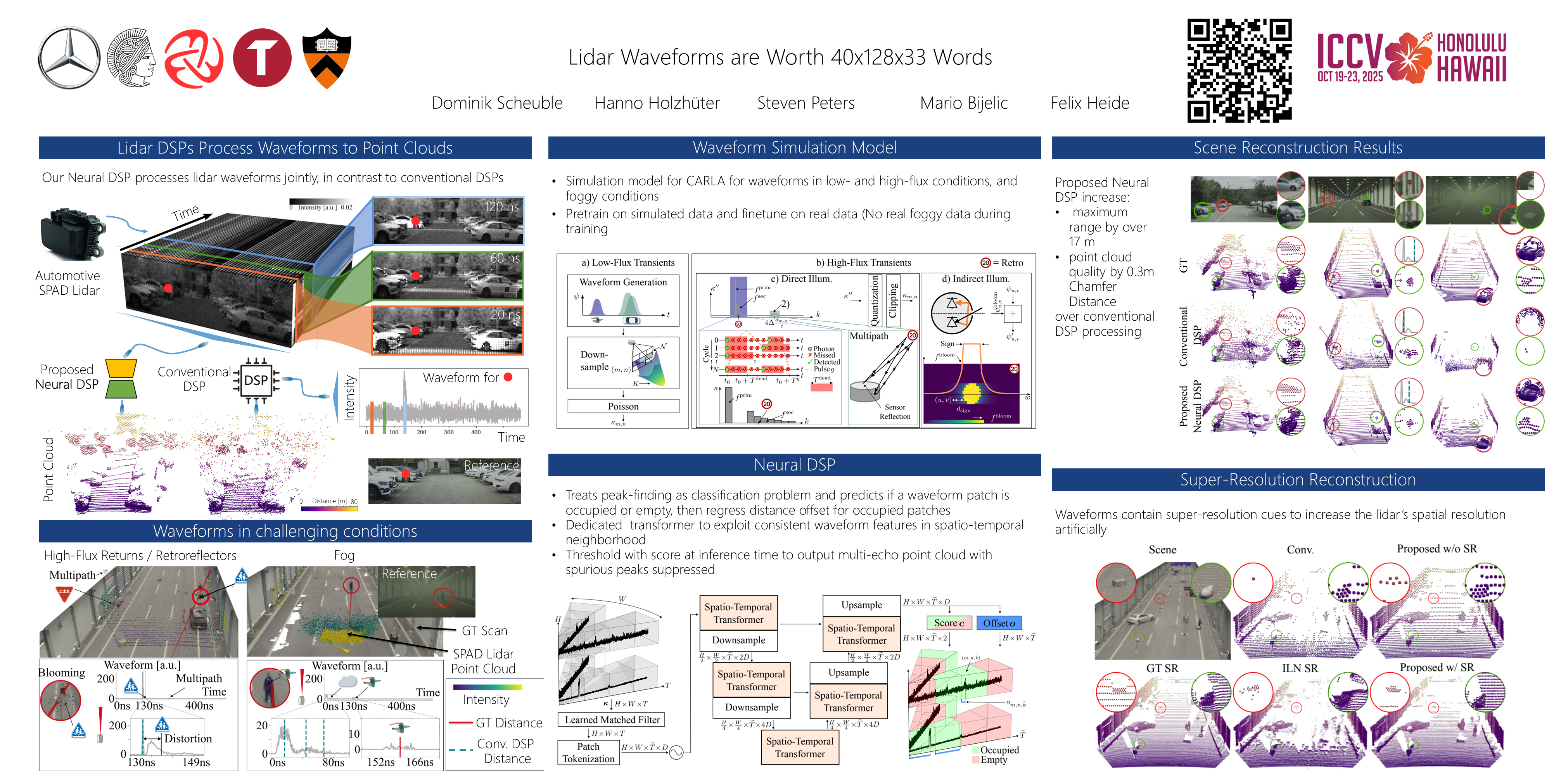
Lidar Waveforms are Worth 40x128x33 Words
 Highlight
Highlight
{kind=link}
Abstract
Lidar has become crucial for autonomous driving, providing high-resolution 3D scans that are key for accurate scene understanding. To this end, lidar sensors measure the time-resolved full waveforms from the returning laser light, which a subsequent digital signal processor (DSP) converts to point clouds by identifying peaks in the waveform. Conventional automotive lidar DSP pipelines process each waveform individually, ignoring potentially valuable context from neighboring waveforms. As a result, lidar point clouds are prone to artifacts from low signal-to-noise ratio (SNR) regions, highly reflective objects, and environmental conditions like fog. While leveraging neighboring waveforms has been investigated extensively in transient imaging, the application has been limited to scientific or experimental hardware. In this work, we propose a learned DSP that directly processes full waveforms using a transformer architecture leveraging features from adjacent waveforms to generate high-fidelity multi-echo point clouds. To assess our method, we modify a conventional automotive lidar and capture data in real-world driving scenarios. Furthermore, we collect dedicated test sets in a weather chamber to asses our method in different environmental conditions. Trained on both synthetic and real data, the method improves Chamfer distance by 32 cm and 20 cm compared to on-device peak finding methods and existing transient imaging approaches, respectively.