Axis-level Symmetry Detection with Group-Equivariant Representation
{kind=link}
Abstract
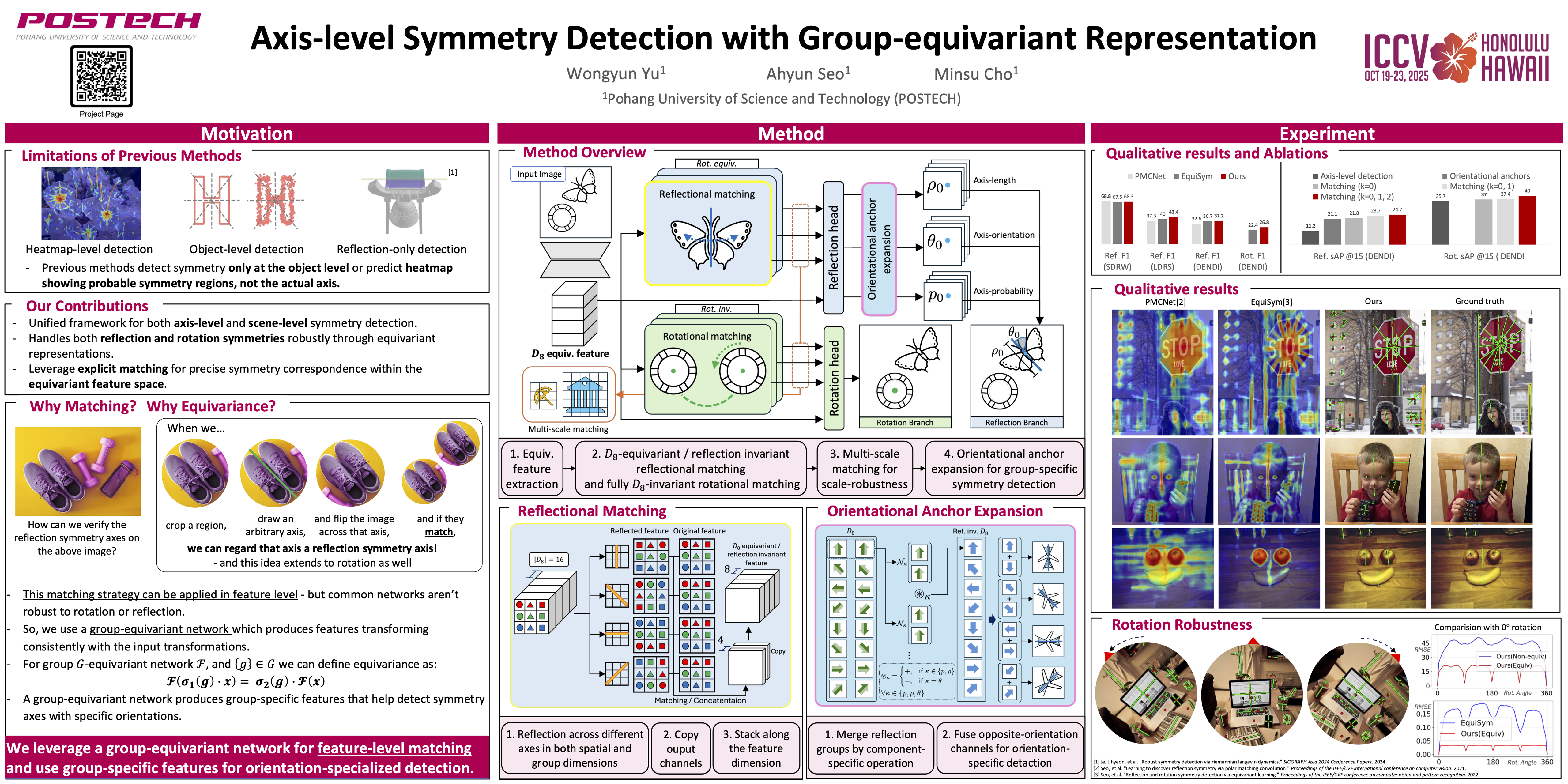
Symmetry is a fundamental concept that has been studied extensively; however, its detection in complex scenes remains challenging in computer vision. Recent heatmap-based methods identify potential regions of symmetry axes but lack precision for individual axis. In this work, we introduce a novel framework for axis-level detection of the most common symmetry types—reflection and rotation—representing them as explicit geometric primitives i.e., lines and points. We formulate a dihedral group-equivariant dual-branch architecture, where each branch exploits the properties of dihedral group-equivariant features in a novel, specialized manner for each symmetry type. Specifically, for reflection symmetry, we propose orientational anchors aligned with group components to enable orientation-specific detection, and reflectional matching that computes similarity between patterns and their mirrored counterparts across potential reflection axes. For rotational symmetry, we propose rotational matching that computes the similarity between patterns at fixed angular intervals. Extensive experiments demonstrate that our method significantly outperforms state-of-the-art methods.