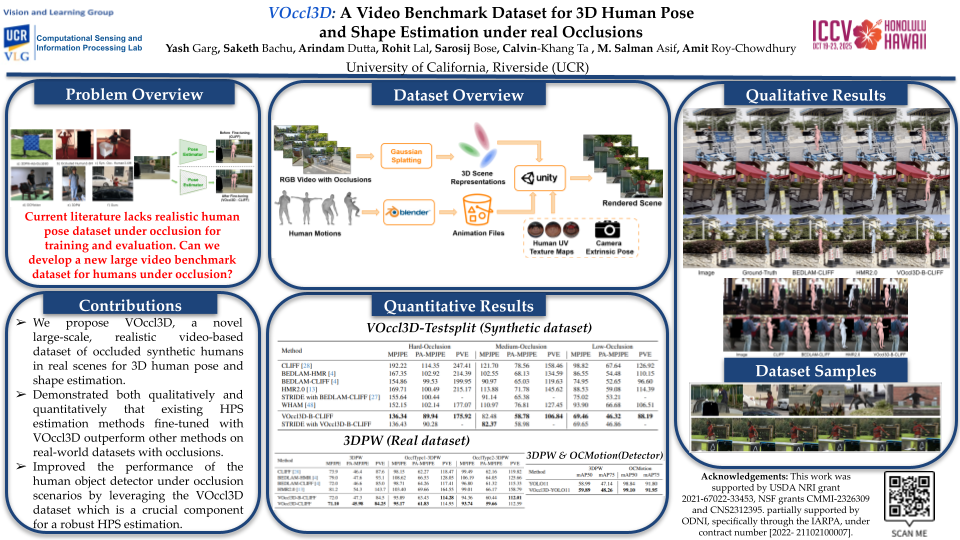
VOccl3D: A Video Benchmark Dataset for 3D Human Pose and Shape Estimation under real Occlusions
Yash Garg ⋅ Saketh Bachu ⋅ Arindam Dutta ⋅ Rohit Lal ⋅ Sarosij Bose ⋅ Calvin-Khang Ta ⋅ M. Salman Asif ⋅ Amit Roy-Chowdhury
2025 Poster
{kind=link}
Abstract
Human pose and shape (HPS) estimation methods have been extensively studied, with many demonstrating high zero-shot performance on in-the-wild images and videos. However, these methods often struggle in challenging scenarios involving complex human poses or significant occlusions. Although some studies address 3D human pose estimation under occlusion, they typically evaluate performance on datasets that lack realistic or substantial occlusions, e.g., most existing datasets introduce occlusions with random patches over the human or clipart-style overlays, which may not reflect real-world challenges. To bridge this gap in realistic occlusion datasets, we introduce a novel benchmark dataset, VOccl3D, a $\textbf{V}$ideo-based human $\textbf{Occ}$lusion dataset with $\textbf{3D}$ body pose and shape annotations. Inspired by works such as AGORA and BEDLAM, we constructed this dataset using advanced computer graphics rendering techniques, incorporating diverse real-world occlusion scenarios, clothing textures, and human motions. Additionally, we fine-tuned recent HPS methods, CLIFF and BEDLAM-CLIFF, on our dataset, demonstrating significant qualitative and quantitative improvements across multiple public datasets, as well as on the test split of our dataset, while comparing its performance with other state-of-the-art methods. Furthermore, we leveraged our dataset to enhance human detection performance under occlusion by fine-tuning an existing object detector, YOLO11, thus leading to a robust end-to-end HPS estimation system under occlusions. Overall, this dataset serves as a valuable resource for future research aimed at benchmarking methods designed to handle occlusions, offering a more realistic alternative to existing occlusion datasets.
Chat is not available.
Successful Page Load