ForestFormer3D: A Unified Framework for End-to-End Segmentation of Forest LiDAR 3D Point Clouds
{kind=link}
Abstract
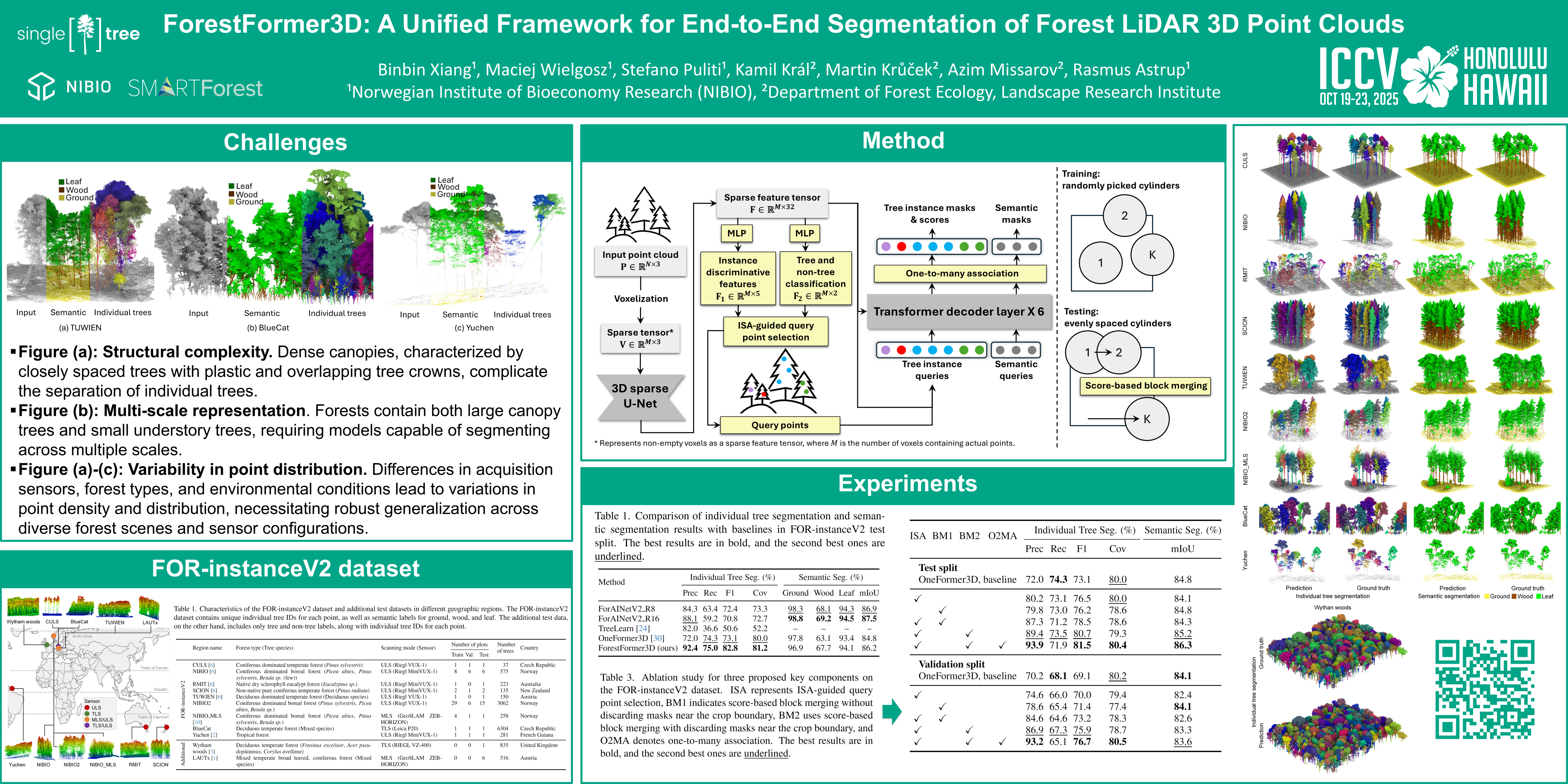
The segmentation of forest LiDAR 3D point clouds, including both individual tree and semantic segmentation, is fundamental for advancing forest management and ecological research. However, current approaches often struggle with the complexity and variability of natural forest environments. We present ForestFormer3D, a new unified and end-to-end framework designed for precise individual tree and semantic segmentation. ForestFormer3D incorporates ISA-guided query point selection, a score-based block merging strategy during inference, and a one-to-many association mechanism for effective training. By combining these new components, our model achieves state-of-the-art performance for individual tree segmentation on the newly introduced FOR-instanceV2 dataset, which spans diverse forest types and regions. Additionally, ForestFormer3D generalizes well to unseen test sets (Wytham woods and LAUTx), showcasing its robustness across different forest conditions and sensor modalities. The FOR-instanceV2 dataset and the ForestFormer3D code will be released post-acceptance.