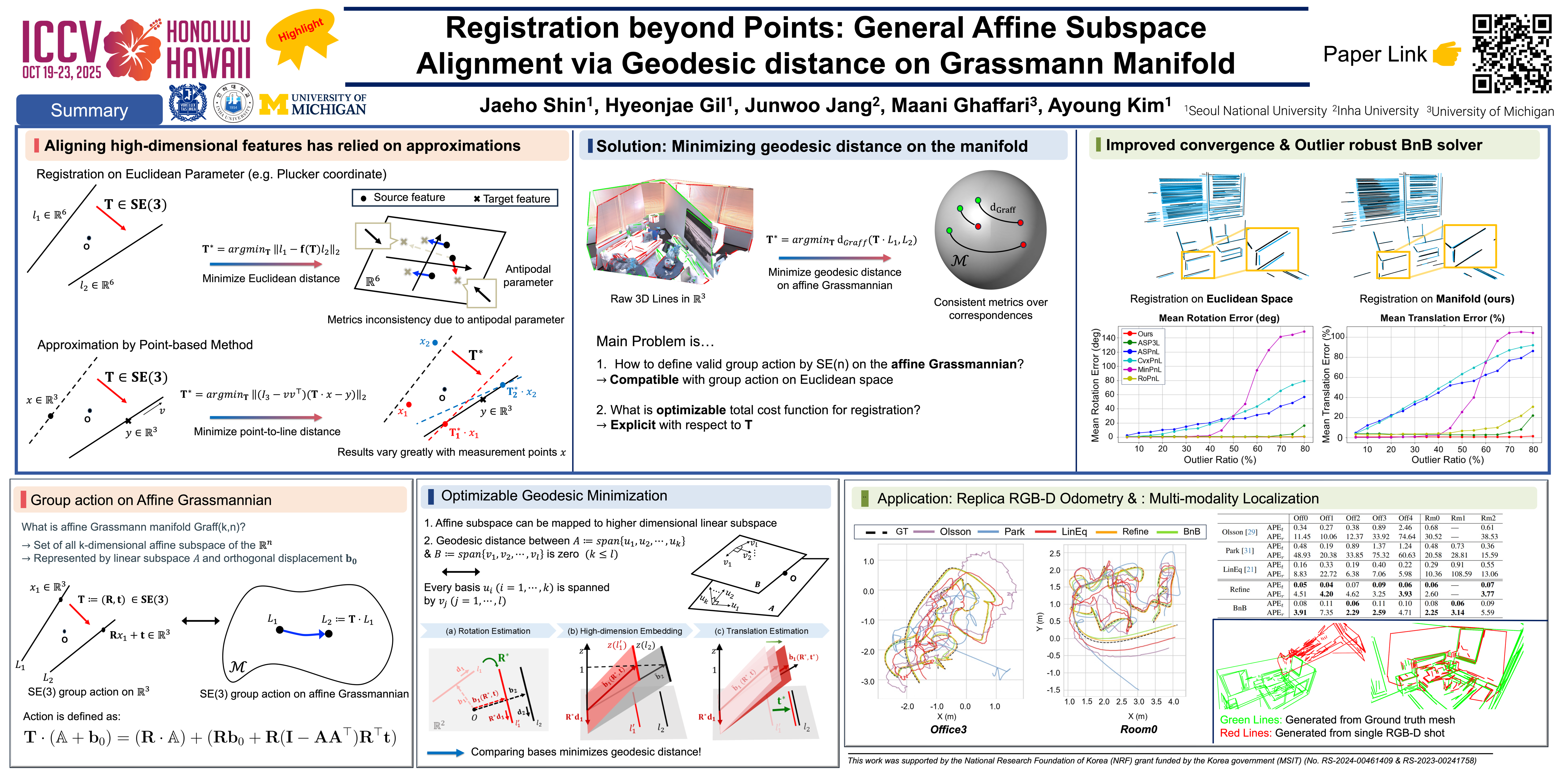
Registration beyond Points: General Affine Subspace Alignment via Geodesic Distance on Grassmann Manifold
Jaeho Shin ⋅ Hyeonjae Gil ⋅ Junwoo Jang ⋅ Maani Ghaffari ⋅ Ayoung Kim
 Highlight
Highlight
2025 Poster
{kind=link}
Abstract
Affine Grassmannian has been favored for expressing proximity between lines and planes due to its theoretical exactness in measuring distances among features. Despite this advantage, the existing method can only measure the proximity without yielding the distance as an explicit function of rigid body transformation. Thus, an optimizable distance function on the manifold has remained underdeveloped, stifling its application in registration problems. This paper is the first to explicitly derive an optimizable cost function between two Grassmannian features with respect to rigid body transformation ($\mathbf{R}$ and $\mathbf{t}$). Specifically, we present a rigorous mathematical proof demonstrating that the bases of high-dimensional linear subspaces can serve as an explicit representation of the cost. Finally, we propose an optimizable cost function based on the transformed bases that can be applied to the registration problem of any affine subspace. Compared to vector parameter-based approaches, our method is able to find a globally optimal solution by directly minimizing the geodesic distance which is agnostic to representation ambiguity. The resulting cost function and its extension to the inlier-set maximizing Branch-and-Bound (BnB) solver have been demonstrated to improve the convergence of existing solutions or outperform them in various computer vision tasks. The code will be made available after the review process.
Chat is not available.
Successful Page Load