Splat-based 3D Scene Reconstruction with Extreme Motion-blur
{kind=link}
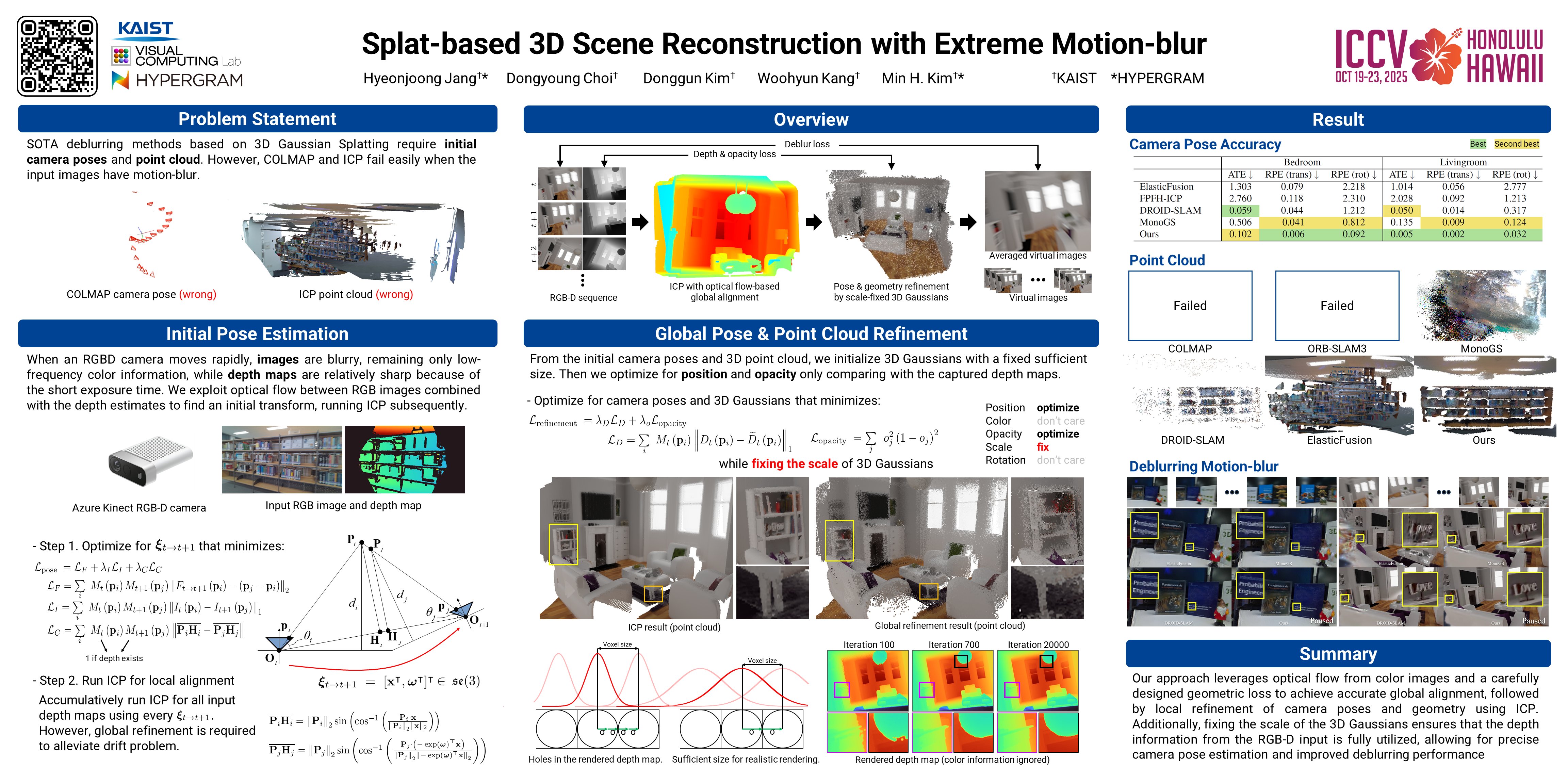
Abstract
We propose a splat-based 3D scene reconstruction method from RGB-D input that effectively handles extreme motion blur, a frequent challenge in low-light environments. Under dim illumination, RGB frames often suffer from severe motion blur due to extended exposure times, causing traditional camera pose estimation methods, such as COLMAP, to fail. This results in inaccurate camera pose and blurry color input, compromising the quality of 3D reconstructions. Although recent 3D reconstruction techniques like Neural Radiance Fields and Gaussian Splatting have demonstrated impressive results, they rely on accurate camera trajectory estimation, which becomes challenging under fast motion or poor lighting conditions. Furthermore, rapid camera movement and the limited field of view of depth sensors reduce point cloud overlap, limiting the effectiveness of pose estimation with the ICP algorithm. To address these issues, we introduce a method that combines camera pose estimation and image deblurring using a Gaussian Splatting framework, leveraging both 3D Gaussian splats and depth inputs for enhanced scene representation. Our method first aligns consecutive RGB-D frames through optical flow and ICP, then refines camera poses and 3D geometry by adjusting Gaussian positions for optimal depth alignment. To handle motion blur, we model camera movement during exposure and deblur images by comparing the input with a series of sharp, rendered frames. Experiments on a new RGB-D dataset with extreme motion blur show that our method outperforms existing approaches, enabling high-quality reconstructions even in challenging conditions. This approach has broad implications for 3D mapping applications in robotics, autonomous navigation, and augmented reality. Both code and dataset will be publicly available.