AutoOcc: Automatic Open-Ended Semantic Occupancy Annotation via Vision-Language Guided Gaussian Splatting
 Highlight
Highlight
{kind=link}
Abstract
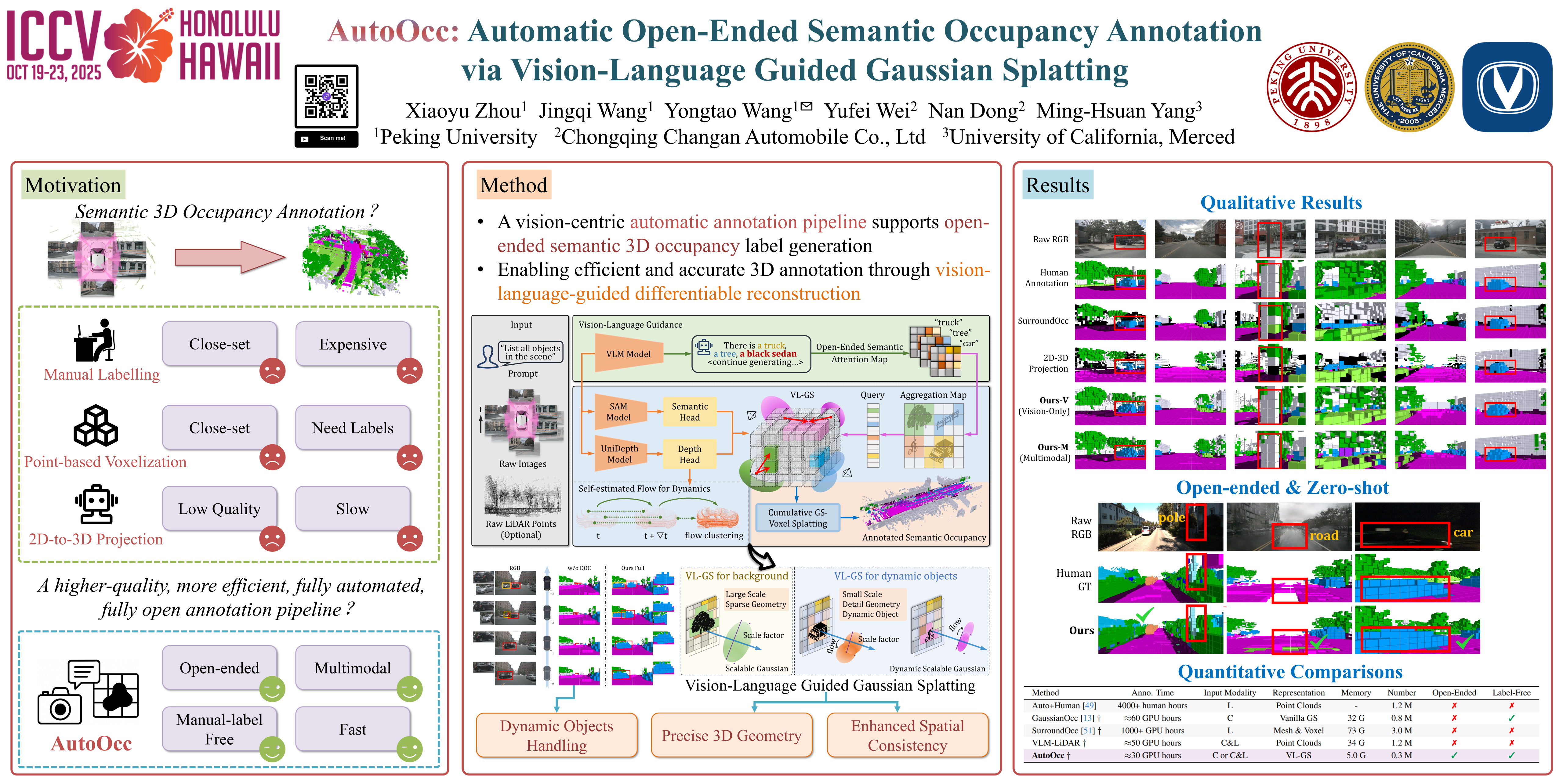
Obtaining high-quality 3D semantic occupancy from raw sensor data remains an essential yet challenging task, often requiring extensive manual labeling. In this work, we propose AutoOcc, an vision-centric automated pipeline for open-ended semantic occupancy annotation that integrates differentiable Gaussian splatting guided by vision-language models. We formulate the open-ended semantic occupancy reconstruction task to automatically generate scene occupancy by combining attention maps from vision-language models and foundation vision models. We devise semantic-aware Gaussians as intermediate geometric descriptors and propose a cumulative Gaussian-to-voxel splatting algorithm that enables effective and efficient occupancy annotation. Our framework outperforms existing automated occupancy annotation methods without human labels. AutoOcc also enables open-ended semantic occupancy auto-labeling, achieving robust performance in both static and dynamically complex scenarios. All the source codes and trained models will be released.