RTMap: Real-Time Recursive Mapping with Change Detection and Localization
{kind=link}
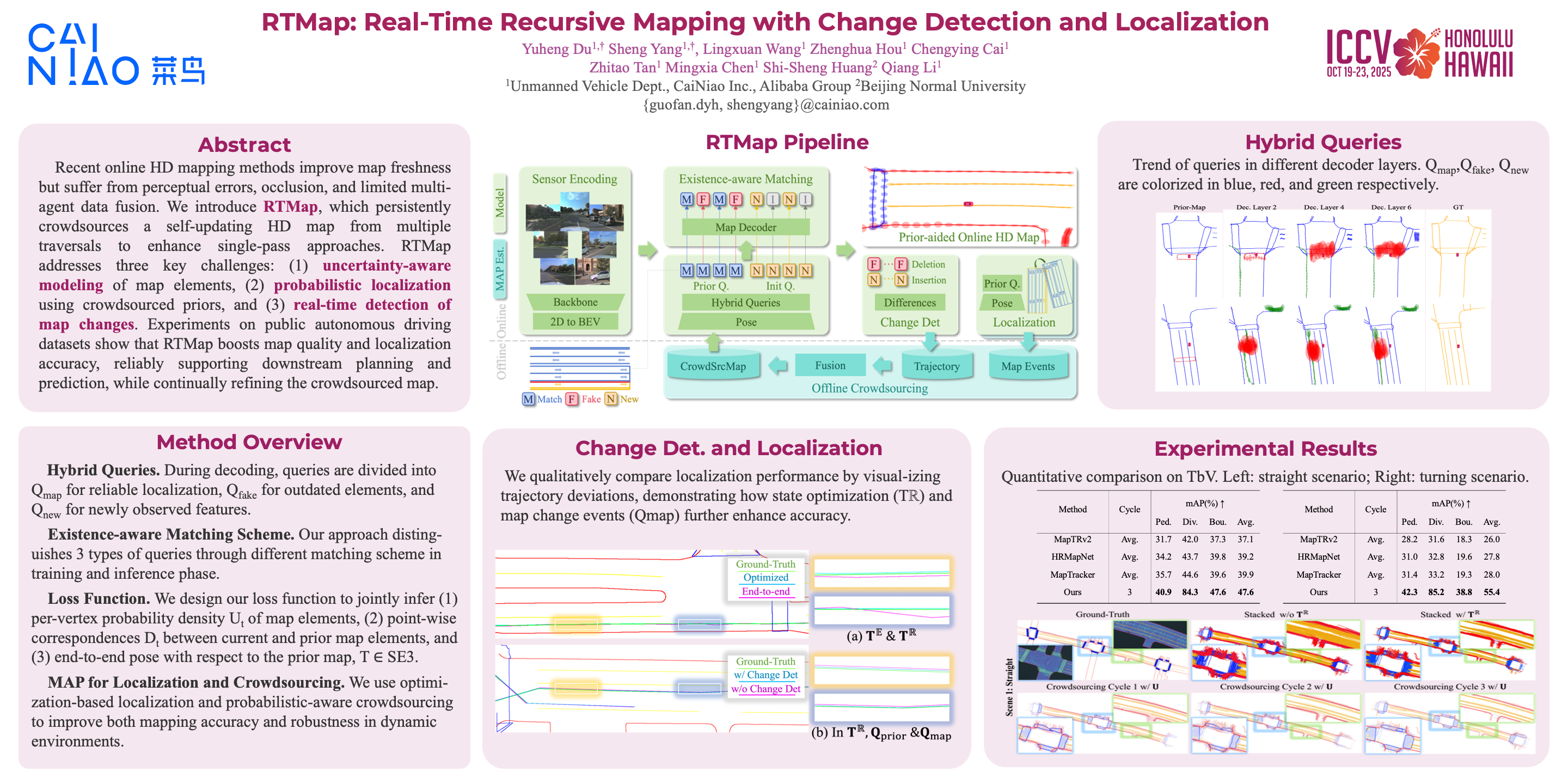
Abstract
While recent online HD mapping methods relieve burdened offline pipelines and solve map freshness, they remain limited by perceptual inaccuracies, occlusion in dense traffic, and an inability to fuse multi-agent observations. We propose RTMap to enhance these single-traversal methods by persistently crowdsourcing a multi-traversal HD map as a self-evolutional memory. On onboard agents, RTMap simultaneously addresses three core challenges in an end-to-end fashion: (1) Uncertainty-aware positional modeling for HD map elements, (2) probabilistic-aware localization w.r.t. the crowdsourced prior-map, and (3) real-time detection for possible road structural changes. Experiments on several public autonomous driving datasets demonstrate our solid performance on both the prior-aided map quality and the localization accuracy, demonstrating our effectiveness of robustly serving downstream prediction and planning modules while gradually improving the accuracy and freshness of the crowdsourced prior-map asynchronously.