VGMamba: Attribute-to-Location Clue Reasoning for Quantity-Agnostic 3D Visual Grounding
{kind=link}
Abstract
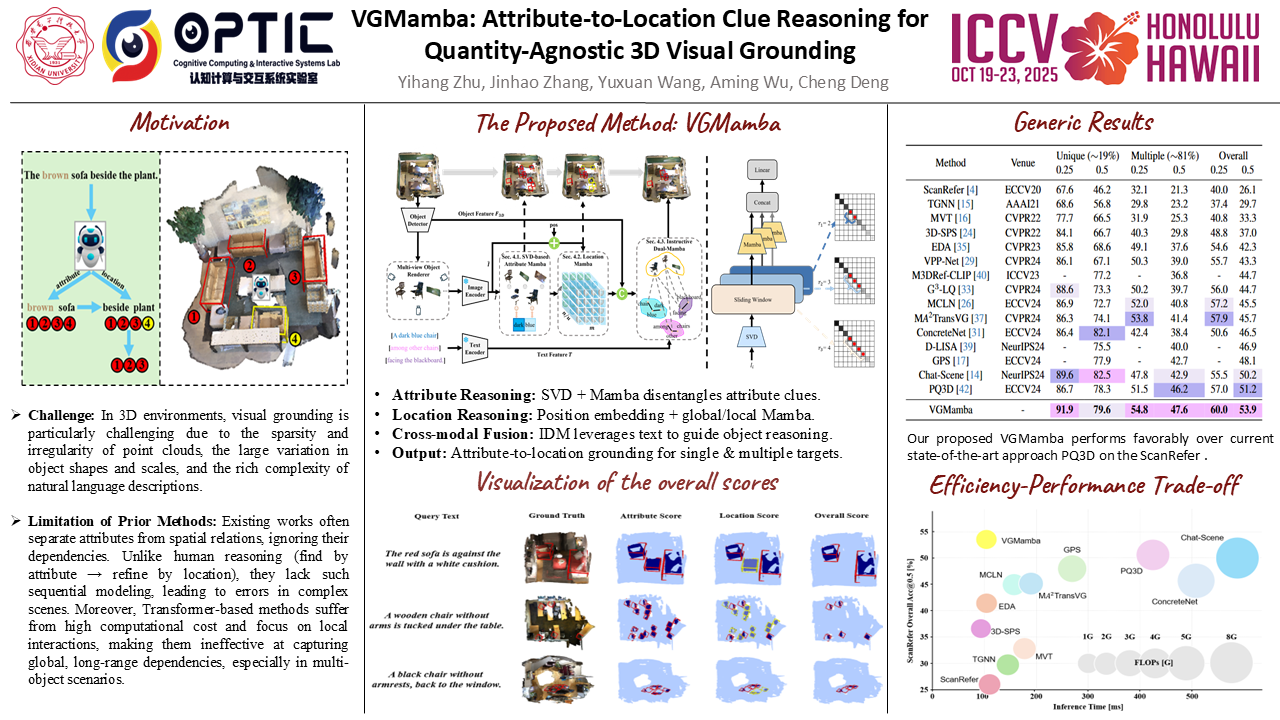
As an important direction of embodied intelligence, 3D Visual Grounding has attracted much attention, aiming to identify 3D objects matching the given language description. Most existing methods often follow a two-stage process, i.e., first detecting proposal objects and identifying the right objects based on the relevance to the given query. However, when the query is complex, it is difficult to leverage an abstract language representation to lock the corresponding objects accurately, affecting the grounding performance. In general, given a specific object, humans usually follow two clues to finish the corresponding grounding, i.e., attribute and location clues. To this end, we explore a new mechanism, attribute-to-location clue reasoning, to conduct accurate grounding. Particularly, we propose a VGMamba network that consists of an SVD-based attribute mamba, location mamba, and multi-modal fusion mamba. Taking a 3D point cloud scene and language query as the input, we first exploit SVD to make a decomposition of the extracted features. Then, a slidingwindow operation is conducted to capture attribute characteristics. Next, a location mamba is presented to obtain the corresponding location information. Finally, by means of multi-modal mamba fusion, the model could effectively localize the object that matches the given query. In the experiment, our method is verified on four datasets. Extensive experimental results demonstrate the superiority of our method.