UAVScenes: A Multi-Modal Dataset for UAVs
{kind=link}
Abstract
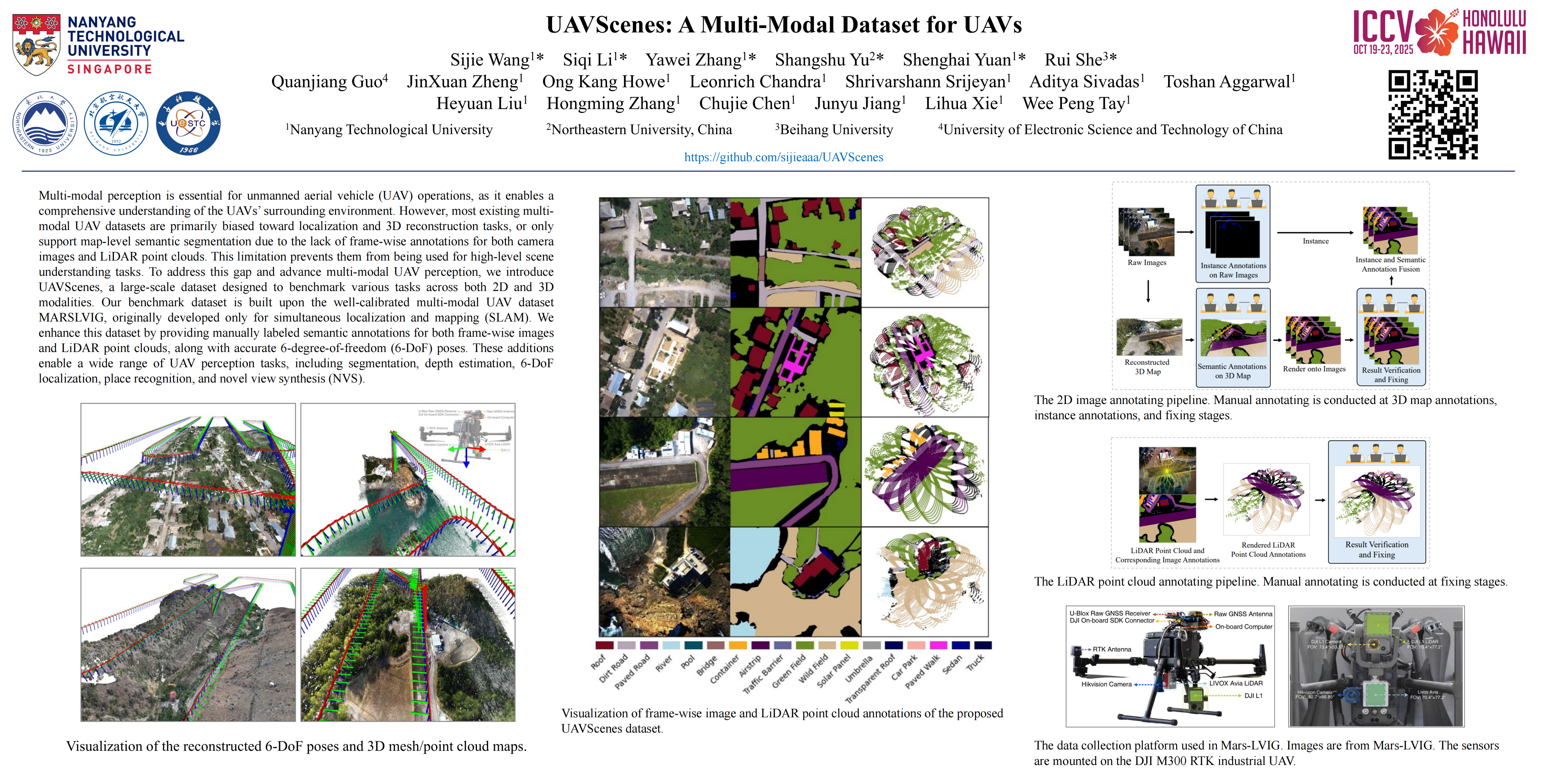
Multi-modal perception is essential for unmanned aerial vehicle (UAV) operations, as it enables a comprehensive understanding of the UAVs' surrounding environment. However, most existing multi-modal UAV datasets are primarily biased toward localization and 3D reconstruction tasks, or only support map-level semantic segmentation due to the lack of frame-wise annotations for both camera images and LiDAR point clouds. This limitation prevents them from being used for high-level scene understanding tasks. To address this gap and advance multi-modal UAV perception, we introduce UAVScenes, a large-scale dataset designed to benchmark various tasks across both 2D and 3D modalities. Our benchmark dataset is built upon the well-calibrated multi-modal UAV dataset MARS-LVIG, originally developed only for simultaneous localization and mapping (SLAM). We enhance this dataset by providing manually labeled semantic annotations for both frame-wise images and LiDAR point clouds, along with accurate 6-degree-of-freedom (6-DoF) poses. These additions enable a wide range of UAV perception tasks, including segmentation, depth estimation, 6-DoF localization, place recognition, and novel view synthesis (NVS).