EgoAgent: A Joint Predictive Agent Model in Egocentric Worlds
{kind=link}
Abstract
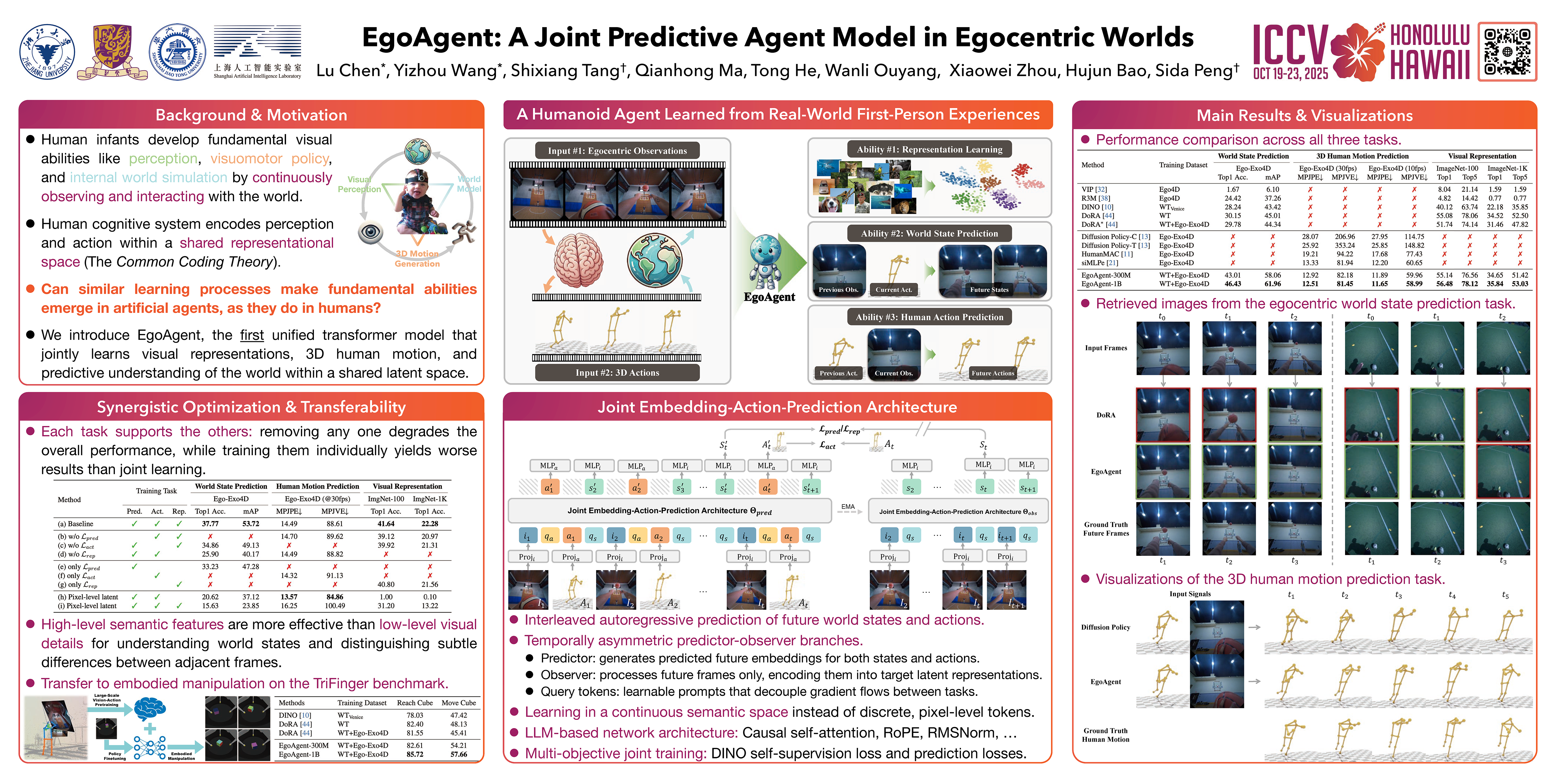
This paper addresses the task of learning an agent model behaving like humans, which can jointly perceive, predict, and act in egocentric worlds. Previous methods usually train separate models for these three abilities, which prevents them from learning from each other. In this paper, we propose a joint predictive agent model, named EgoAgent, that simultaneously learns to represent the world, predict future states, and take reasonable actions within a single transformer. EgoAgent introduces two innovations to learn from the causal and temporally intertwined nature of these abilities: (1) Interleaved sequential modeling of states and actions with the causal attention mechanism, and (2) A joint embedding-action-prediction architecture featuring temporal asymmetric predictor-observer branches. Integrating these designs based on JEPA, EgoAgent unifies these capabilities in a cohesive learning framework. Comprehensive evaluations of EgoAgent on representative tasks such as image classification, egocentric future state prediction, and 3D human motion prediction tasks demonstrate the superiority of our method. The code and trained model will be released for reproducibility.