OVA-Fields: Weakly Supervised Open-Vocabulary Affordance Fields for Robot Operational Part Detection
{kind=link}
Abstract
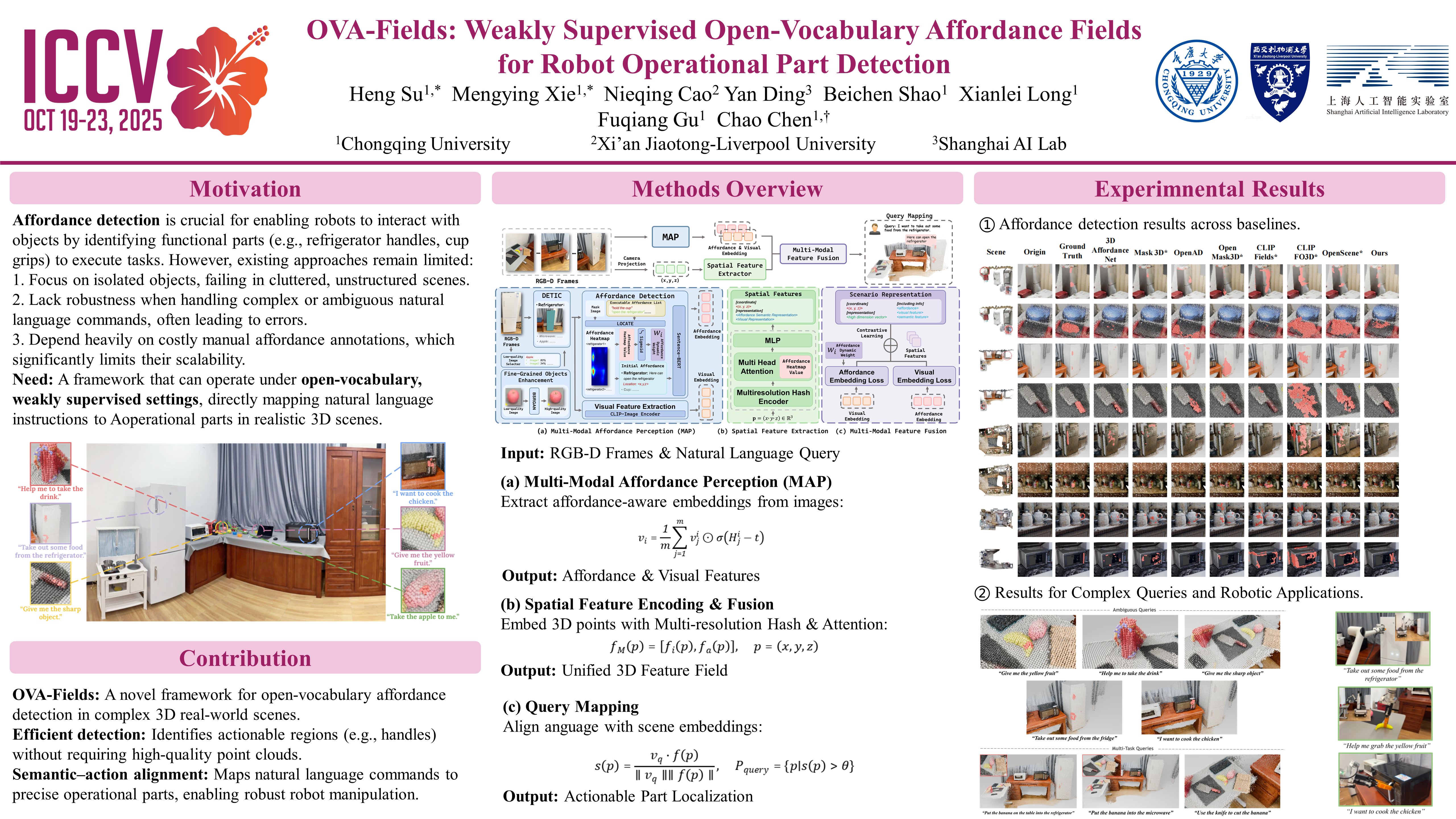
In recent years, affordance detection has become essential for robotic manipulation in real-world scenes, where robots must autonomously interpret commands and perform actions. Current methods often focus on individual point cloud objects or simple semantic queries, limiting their effectiveness in diverse scenes and complex instructions. To address this, we introduce OVA-Fields, a framework for affordance detection in 3D scenes with complex semantics. By integrating multilevel geometric encoding and enhanced semantic affordance embeddings, OVA-Fields maps user commands directly to operational parts, embedding enriched affordance information into the 3D scene. Experimental results demonstrate that OVA-Fields achieves 52.4\% mIoU on complex semantic real-world scenes and 90\% success rate in real-world robot manipulation tasks (e.g., "take out some food from the refirgerator") using RGB-D sensing. Our approach enables the precise identification of operational parts, transforming natural language queries into targeted manipulations in real-world environments.